Equipado con encoder absoluto sin batería
Serie AZ αSTEP

- Equipado con encoder absoluto sin batería
- Alimentación CA/CC
- Compatible con redes industriales
- Amplio rango de velocidad y par
Features | Serie AZ αSTEP
- Equipado con sensor ABZO
- Ahorro energético y baja generación de calor
- Unión de control en lazo cerrado y lazo abierto, estable y rápida incluso sin ajuste
- Tipos y características del tipo de motor con reductor
- Características y gama de productos del controlador
- Prueba y monitorización mediante el software de soporte
Equipado con sensor ABZO
Sensor ABZO de nuevo desarrollo
Se trata del encoder absoluto mecánico sin batería. Contribuye a la mejora de la productividad y a la reducción de costes.
Tanto el motor como el controlador tienen precios razonables.

Sensor de tipo mecánico
El sensor ABZO está equipado con múltiples engranajes y la detección de la información de posición se realiza al reconocer el ángulo de cada uno de los engranajes.
La característica de este sistema es que no requiere baterías.
Encoder absoluto multi-vuelta
La detección de posición absoluta es posible en un rango ±900 revoluciones (1800 revoluciones) del eje del motor desde la posición de inicio de referencia
- *±450 revoluciones (900 revoluciones) para productos de tamaño de brida 20 mm, 28 mm (30 mm).
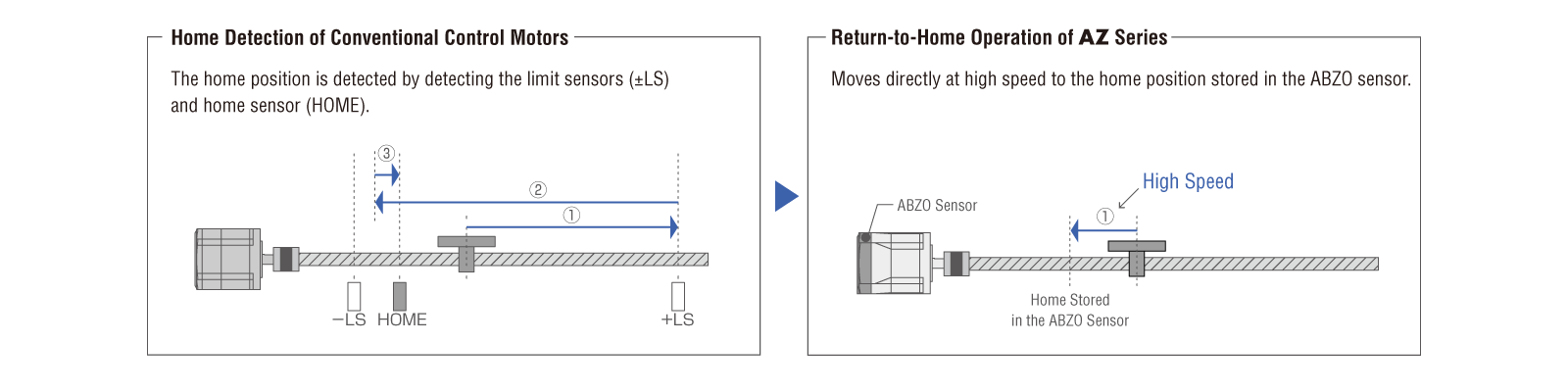
No se necesitan sensores externos
Al tratarse de un sistema absoluto, no son necesarios sensores externos como el sensor de referenciado (Home) o sensores de finales de carrera.
Mejora en el referenciado alta velocidad y precisión del posicionamiento
El posicionamiento de referenciado (Homing) se puede realizar sin sensor o sensores de fin de carrera. Se reduce así el ciclo de la máquina, logrando un retorno a origen de alta velocidad sin preocuparse por la sensibilidad del sensor. Se eliminan de este modo las variaciones en la posición de inicio por este motivo. Se mejora así la precisión del referenciado.
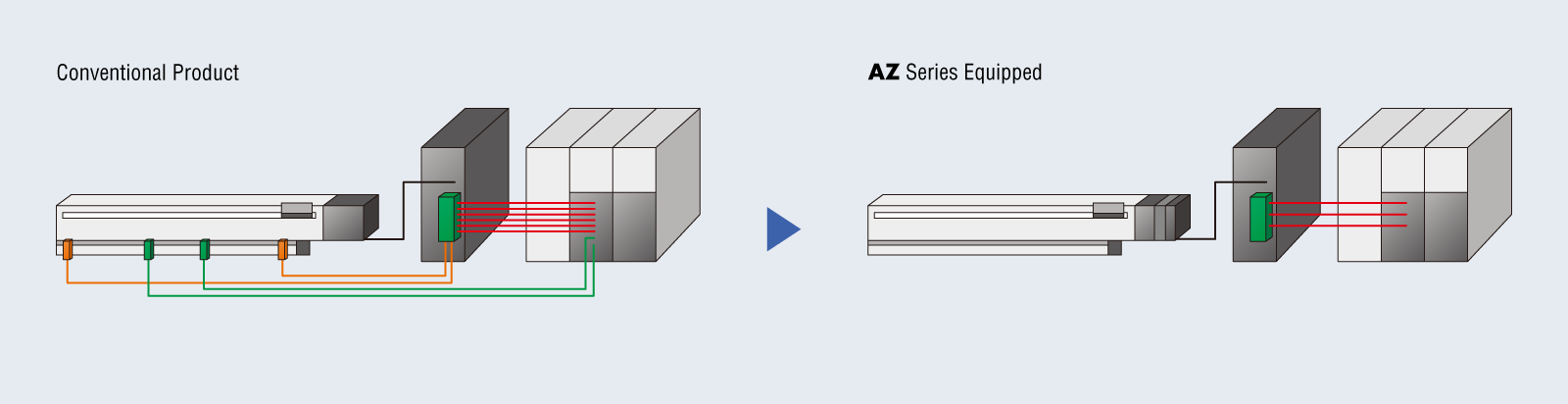
Coste reducido
Se eliminan los costes de cableado y de sensores externos. Se reduce el coste de todo el sistema.
Mayor flexibilidad en el diseño de equipos
Supone un ahorro en el espacio que antes era necesario para instalar y cablear sensores externos. Se mejora en flexibilidad a la hora de diseñar los equipos.
No se ve afectado por los fallos de funcionamiento de sensores externos
Elimina fallos de malfuncionamiento o de desconexión de sensores externos que se pueden producir en entornos de neblina de aceite o arranque de virutas por mecanizado de metales.
Aquí algunos comentarios reales de clientes que han comprado y utilizado nuestros productos.
-
 En el quipo que fabricábamos, teníamos muchos problemas con el sensor debido al entorno lleno de polvo. Al implementar ahora los AZ conseguimos eliminar la necesidad de sensores, por lo que la puesta en marcha es mucho más sencilla.
En el quipo que fabricábamos, teníamos muchos problemas con el sensor debido al entorno lleno de polvo. Al implementar ahora los AZ conseguimos eliminar la necesidad de sensores, por lo que la puesta en marcha es mucho más sencilla. -
Para minimizar la generación de calor en la mayor medida posible, cortamos la alimentación en el motor después de cada operación.
Es bueno no tener que volver a la posición de origen cuando se da alimentación y se empieza a andar de nuevo. -
 Queríamos marchara a baja velocidad en el área de inspección y a alta velocidad fuera del área.
Queríamos marchara a baja velocidad en el área de inspección y a alta velocidad fuera del área.
Dimos por supuesta la necesidad de sensores, pero sorprendentemente era posible el movimiento sin sensores utilizando la función de entrada virtual de la Serie AZ. -
Durante el mantenimiento, es útil poder retener la información de posición del motor incluso cuando el cable está desconectado. Esto elimina la necesidad de la operación de retorno a origen después del mantenimiento, como era necesario anteriormente.
-
 Para mecanismos de husillo de bolas utilizábamos hasta ahora sensores de final de carrera, pero el uso de límites por software es también suficiente. El motor es altamante fiable por disponer de información de posición.
Para mecanismos de husillo de bolas utilizábamos hasta ahora sensores de final de carrera, pero el uso de límites por software es también suficiente. El motor es altamante fiable por disponer de información de posición.
Sin batería
Los sensores de tipo mecánico no requieren baterías. Gestiona la información de posición mecánicamente.
Retención de la información de la posición
La información de posición se conserva incluso si se interrumpe la alimentación o si se desconecta el cable entre el motor y controlador durante la operación de posicionamiento.
Reduce el tiempo necesario para la operación de referenciado (home).
Mantenimiento reducido
No es necesario sustituir las baterías. Reduce el tiempo y los costes de mantenimiento.
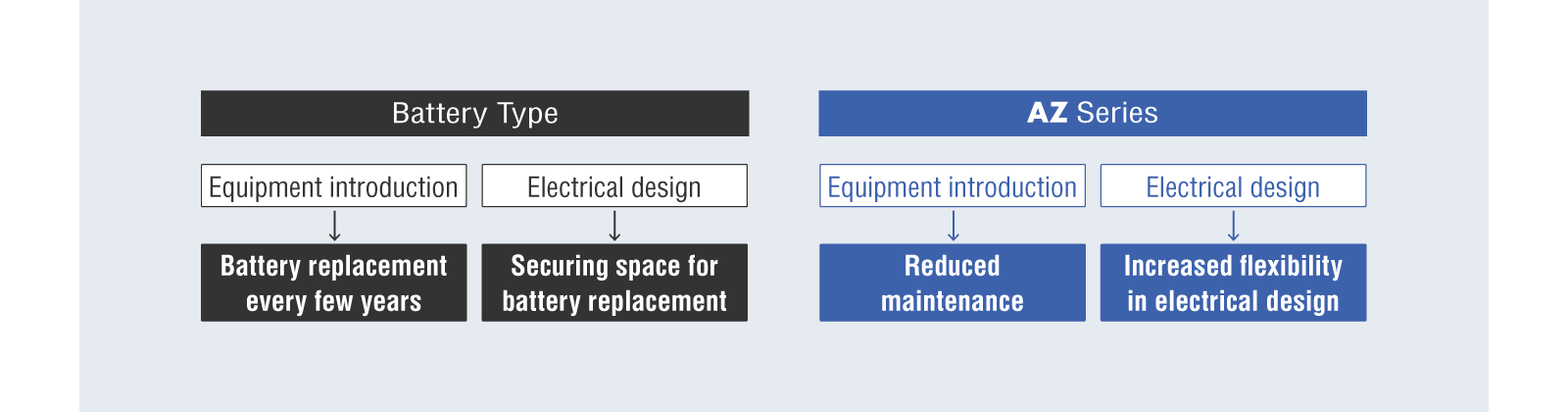
Mayor flexibilidad en la instalación del controlador
Ahorra espacio que antes se requería para la instalación de batería y cableado. No hay restricciones a la hora de ubicar el controlador, lo que mejora la flexibilidad de diseño para la disposición de elementos en el armario de control, etc.
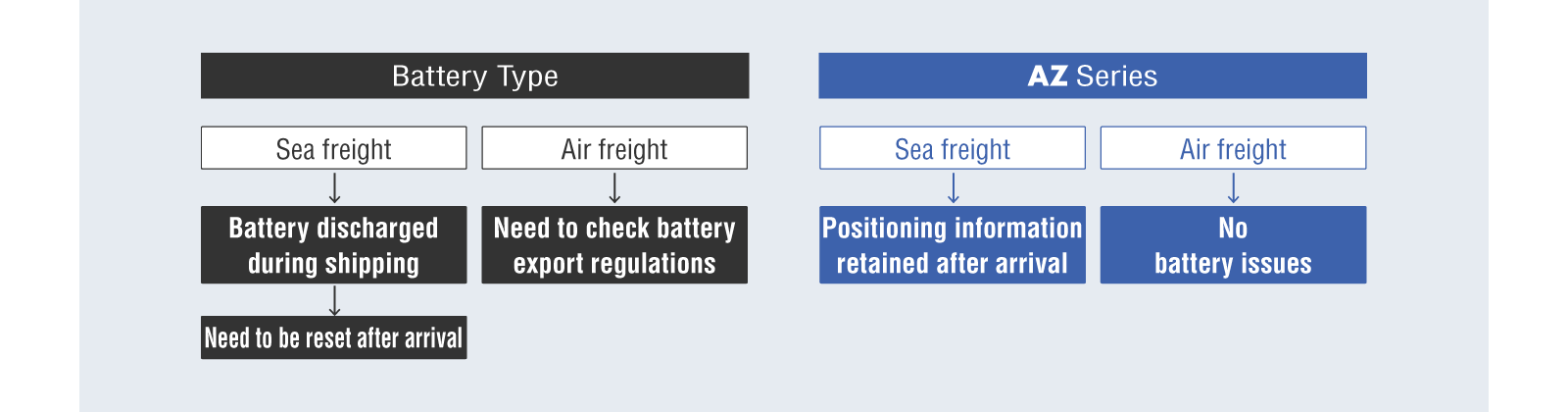
Seguro para envíos en el extranjero
Dado que las baterías se descargan, se debe tener en cuenta cuando el equipo requiera un largo tiempo de transporte, como en envíos al extranjero. El sensor ABZO no hay límite para el tiempo en el que se retiene la información de posición. Además, no es necesario tener en cuenta las diversas normativas aplicables al exportar baterías al extranjero.
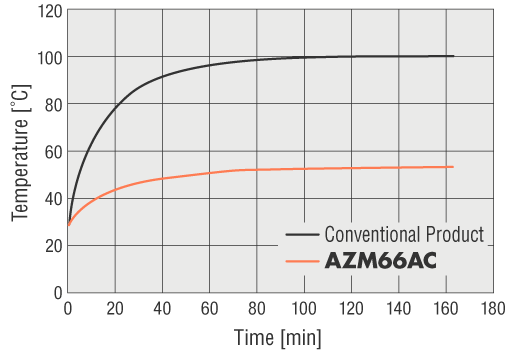
Ahorro energético y baja generación de calor
Reducción significativa de la generación de calor
-
Termografía de distribución de temperatura
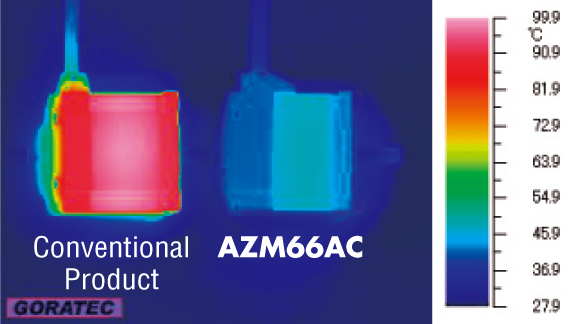
Ejemplo de funcionamiento en las mismas condiciones. -
Temperatura de la superficie del motor durante el funcionamiento en las mismas condiciones
Reducción del consumo gracias al ahorro de energía
-
Alimentación CA
El consumo de energía y emisiones de CO2 se reducen en un 47 % en comparación con los productos convencionales (comparativa de nuestros productos)
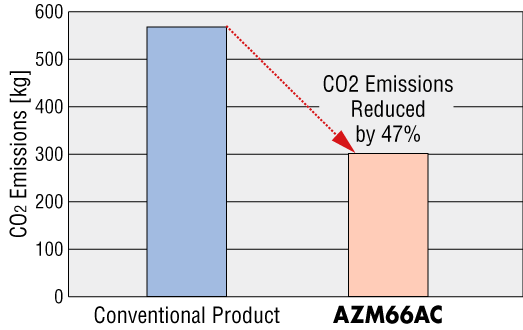
Condiciones de funcionamiento
-
- Velocidad de rotación
- 1000 r/min
-
- Factor de carga
- 50 %
-
- Tiempo de funcionamiento
- Funcionamiento continuo 24 horas, 365 días al año
-
- Régimen de funcionamiento
- Marcha 70 %, espera 25 %, parada 5 %
-
- Voltaje de alimentación
- Monofásica 200-240 VCA
-
- Emisión de CO2
- 0,519 kg-CO2/kWh
-
-
Alimentación CC
Consumo de energía y emisiones de CO2.Reducción del 43 % con respecto al nivel anterior(en comparación con Oriental Motor)
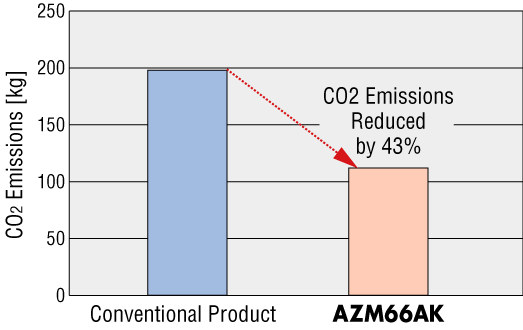
Condición de funcionamiento
-
- Velocidad de rotación
- 1000 r/min
-
- Factor de carga
- 50 %
-
- Tiempo de funcionamiento
- Funcionamiento continuo 24 horas, 365 días del año
-
- Régimen de funcionamiento
- Marcha 70 %, espera 25 %, parada 5 %
-
- Voltaje de alimentación
- 24 VDC
-
- Coeficiente de CO2
- 0,519 kg-CO2/kWh
-
Unión de control en lazo cerrado y lazo abierto, estable y rápida incluso sin ajuste
Control en lazo abierto en operación normal, control en lazo cerrado en funcionamiento con sobrecarga
El sistema trabaja en lazo abierto en condiciones normales, lo que ofrece múltiples ventajas.
En caso de sobrecarga, el sistema cambia automáticamente a control en lazo cerrado para evitar una parada no deseada
Ventajas del control en lazo abierto
Movimiento sincronizado con las consignas sin ajuste de ganancia
Incluso en mecanismos de baja rigidez, como correas dentadas, se pueden seguir consignas sin parametrizaciones.
Funcionamiento sincronizado con la consigna incluso ante cambios en las condiciones de carga
En mecanismos con grandes fluctuaciones de carga, como levas mecánicas, se consigue un seguimiento de la señal de consigna también sin parametrizaciones.
Sin vibración en parada
También se puede utilizar de forma segura en aquellas aplicaciones en las que una ligera vibración en reposo del motor pueda ser un problema.
Ventajas del control lazo cerrado
En caso de sobrecarga, el motor se controla maximizando el par. Evita problemas como la parada del motor debido a un par insuficiente.
Amplia variedad de funciones de monitorización
El sensor está montado en el motor para que la información de posición y velocidad pueda monitorizarse constantemente.
También incluye una "señal de finalización de posicionamiento", útil para supervisar el estado de funcionamiento.
Tipos y características del motor con reductor
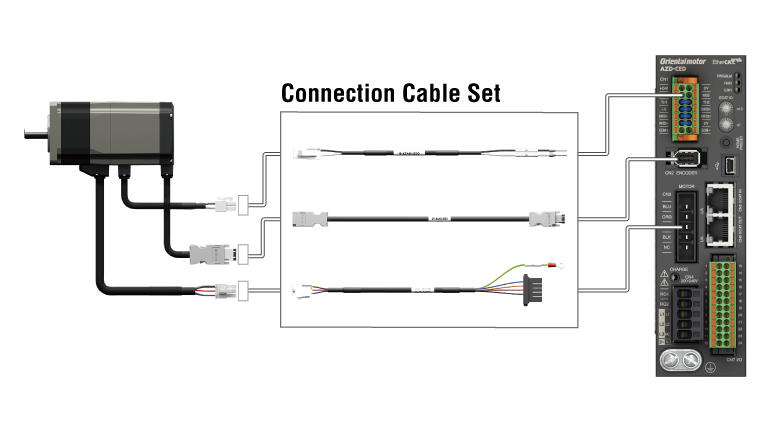
Dos métodos de conexión disponibles para los motores
|
Tipo cable Extensión y conexión con varios cables |
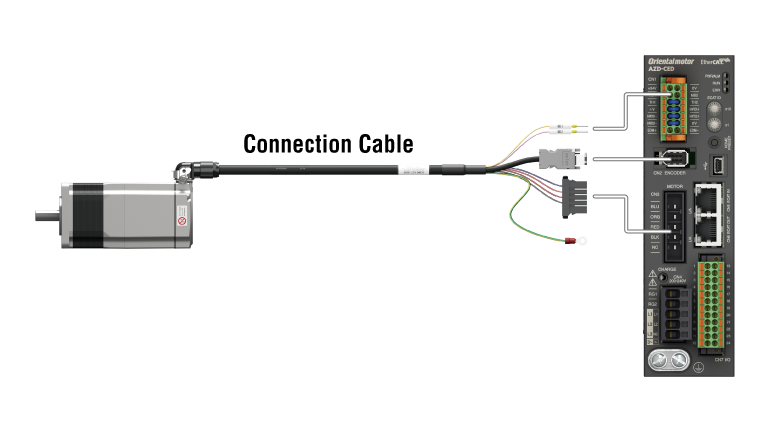
Tipo conector Conexión directa con un solo cable Haga clic aquí para ver las características y ventajas del tipo conector |
|---|---|
|
|
Tipo conector (protección IP66) para uso en condiciones húmedas
Con un grado de protección IP66, dispone de un gran comportamiento de resistencia al polvo, apto para ambientes húmedos
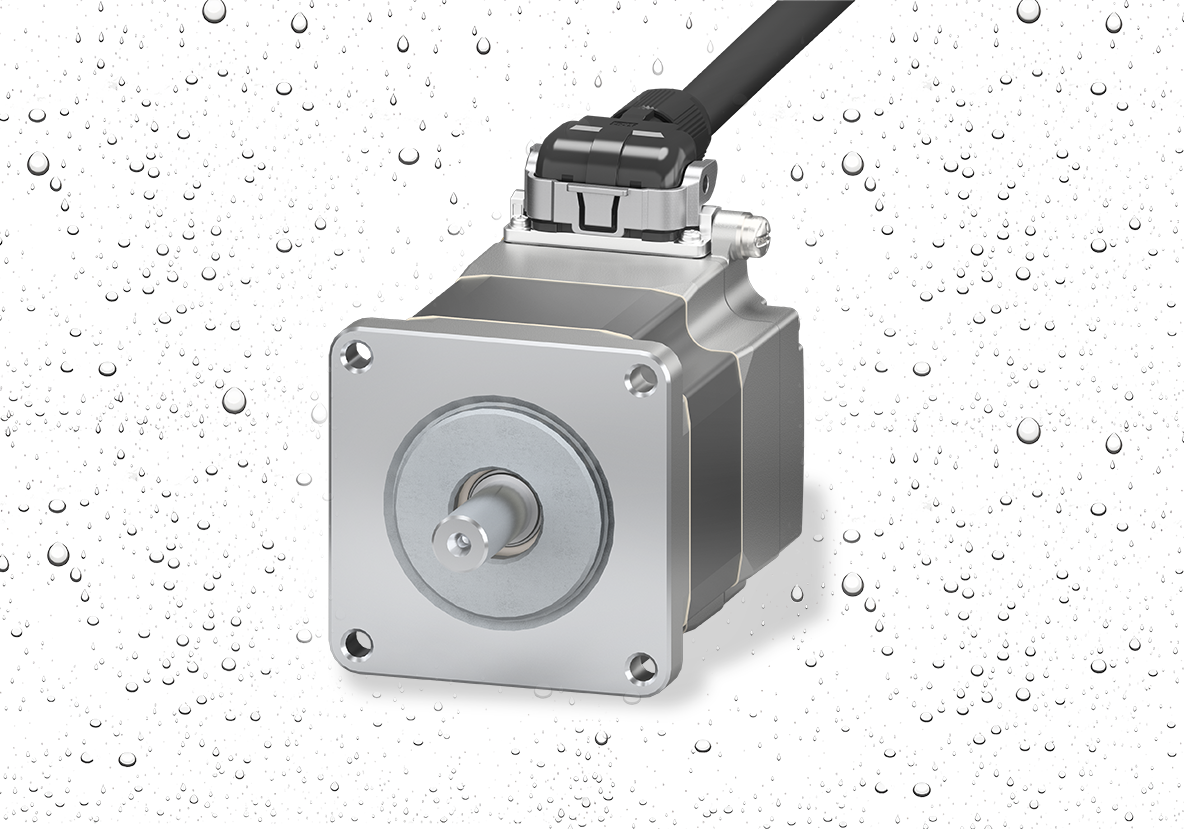
“Prueba de resistencia a salpicaduras” para la consideración de deterioro en el tiempo Evaluación propia Oriental Motor
Ubicación de instalación del motor en interiores
En lugares donde salpica el agua. Excluye instalaciones expuestas a petróleo y productos químicos, bajo agua y áreas sometidas a alta presión de agua.
Nuestra exclusiva "prueba de resistencia a salpicaduras"
Se persigue confirmar la no intrusión de agua mediante la sucesión de los siguientes test: ① prueba de choque térmico, ② ensayo de vibraciones y ③ prueba de chorro de agua.
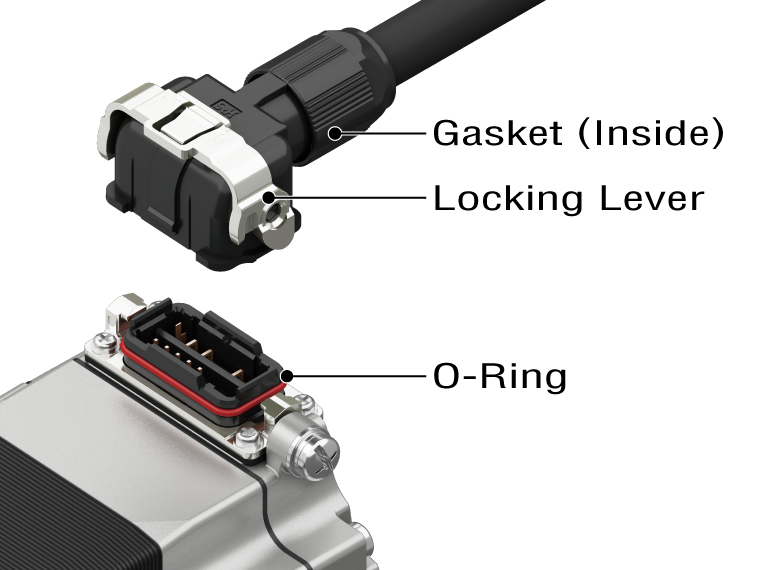
Estructura del conector
El conector dispone de un prensaestopa integrado y una junta tórica para mejorar la impermeabilidad. Conforme a IP66, incluida la parte del conector.
Tipos y características del tipo motorreductor
Además de pares elevados y alta resolución, se obtienen otras ventajas, como la capacidad manejar grandes inerciales.
Haga clic aquí para conocer las ventajas del tipo reductor
| Tipo | Características | Tamaño de brida [mm] |
Juego [arcmin] |
Resolución (Ajuste resolución: 1000 P/R) [o / Pulso] |
|
|---|---|---|---|---|---|
| Reductor TS |

|
|
42~90 | 10~45 | 0,012~0,1 |
| Reductor ortogonal FC |

|
|
35, 42, 60 | 10~40 | 0,012~0,05 |
| Reductor PS |

|
|
28~90 | 7~35 | 0,0072~0,072 |
| Reductor HPG |

|
|
40~90 | 3 | 0,024~0,072 |
| Reductor armónico |

|
|
30~90 | 0 | 0,0036~0,0072 |
Mounting Adapter for Linear Actuator (Linear actuator) (Sold separately)

- Achieve linear motion by assembling with a stepper motor
- Use a lead screw and wear-resistant resin nut
- Frame size 30/42 mm, stroke 50-300 mm
- Thrust, self-locking force: Maximum 100 N (Frame size: 42 mm)
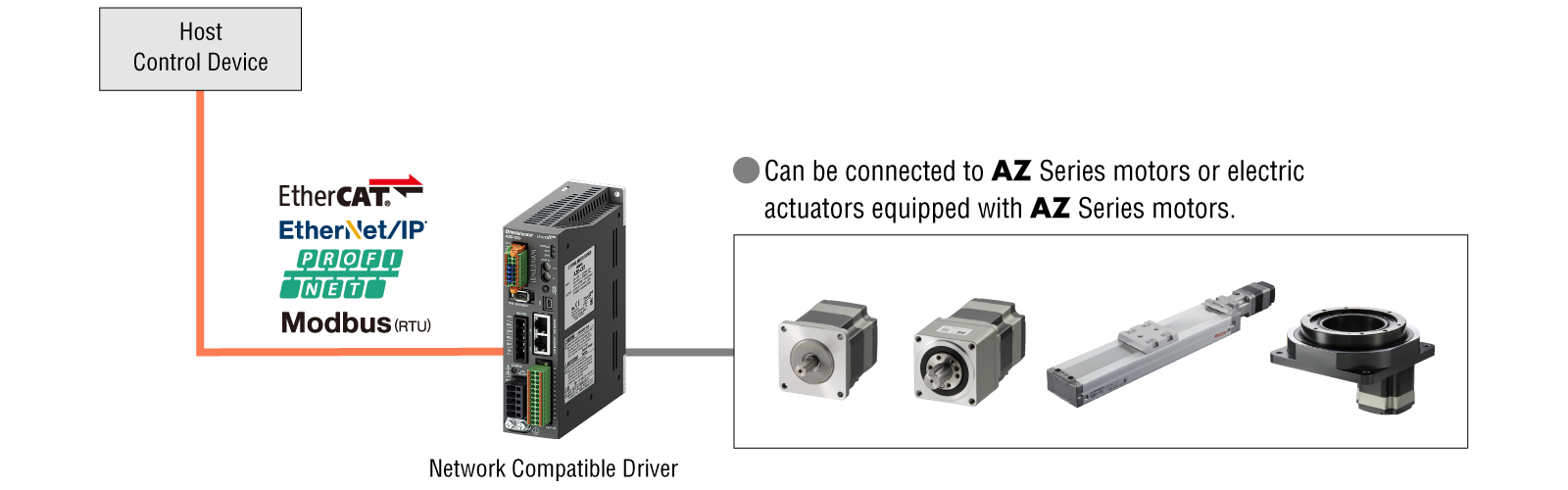
Gama de productos y características del controlador
Controlador compatible con redes industriales
Compatible con las principales buses de campo utilizados en el mundo, contribuyendo a la gestión centralizada de la información de los equipos y a la reducción de cableado. El controlador con alimentación en CA es superior al de alimentación en CC en términos de par de salida del motor, mientras que el controlador con alimentación en CC es más compacto que el homólogo en CA A elección según el propósito y aplicación.
-

Alimentación CA -

Alimentación CC
|
|
|

|
|
| Compatible EtherCAT | Compatible EtherNet/IP | Compatible con PROFINET | Tipo controlador integrado |
| Alimentación CA Alimentación CC |
Alimentación CA Alimentación CC |
Alimentación CA Alimentación CC |
Alimentación CA Alimentación CC |
Controlador mini (solo en alimentación CC)
Mini controlador para un diseño más compacto y ligero que el controlador convencional de un solo eje. Para instalaciones en espacios pequeños. Debido a las amplia especificación de alimentación de entrada, se puede utilizar con baterías. Adecuado para la incorporación en equipos autopropulsados.
Haga clic aquí para más información
Compatible EtherCAT

Compatible EtherNet/IP™

Compatible con PROFINET

Tipo de Ethernet

Tipo comunicación RS-485

Tipo entrada de pulsos con comunicación RS-485

Controlador multieje (solo alimentación en CC)
Controlador multieje para el movimiento de varios ejes, hasta 4, con un solo controlador. La conexión a la red principal y fuente de alimentación se realiza a través un solo controlador, lo que contribuye a un cableado sencillo, ahorro de espacio y coste.
Clic aquí para más información
-
 Tipo
Tipo 2 ejes -
 Tipo
Tipo 3 ejes -
 Tipo
Tipo 4 ejes -
- Para más detalles sobre el tipo slim (delgado), póngase en contacto con su sucursal, oficina de ventas o centro de atención al cliente más cercano.
Tipo controlador integrado
- Los valores de "posición" y "velocidad" se guardan en el controlador, y el módulo de E/S selecciona y ejecuta dichos datos de operación. Se pueden registrar hasta 256 puntos de operation data o perfiles de movimiento.
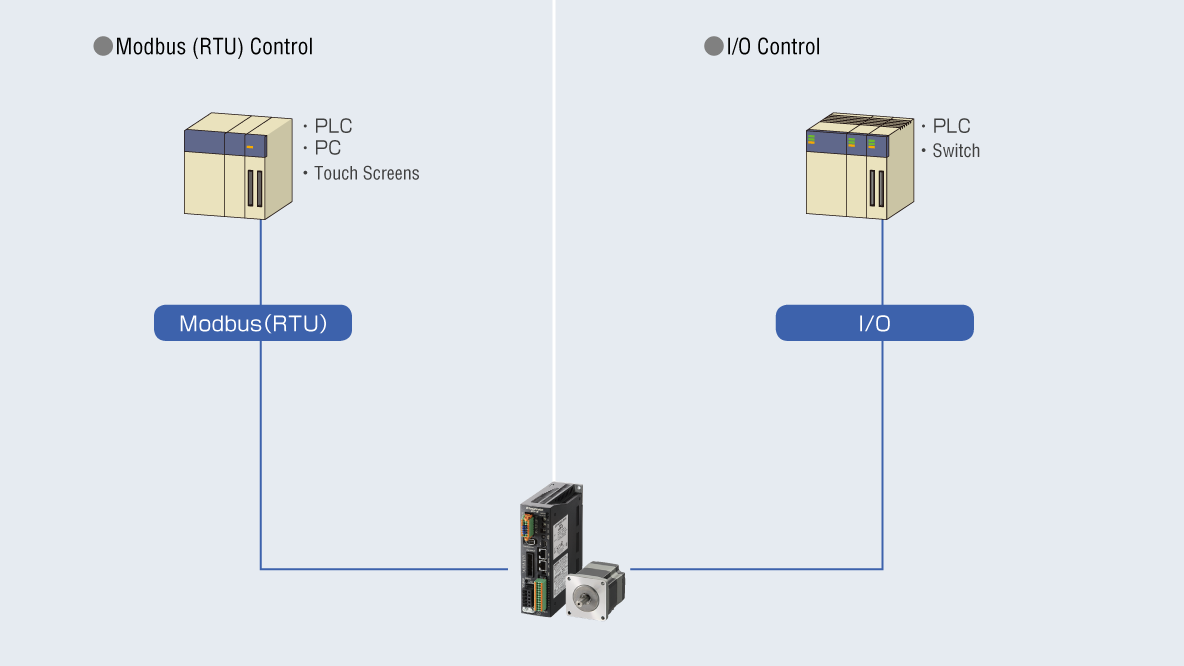
- Se puede controlar mediante E/S, Modbus (RTU).
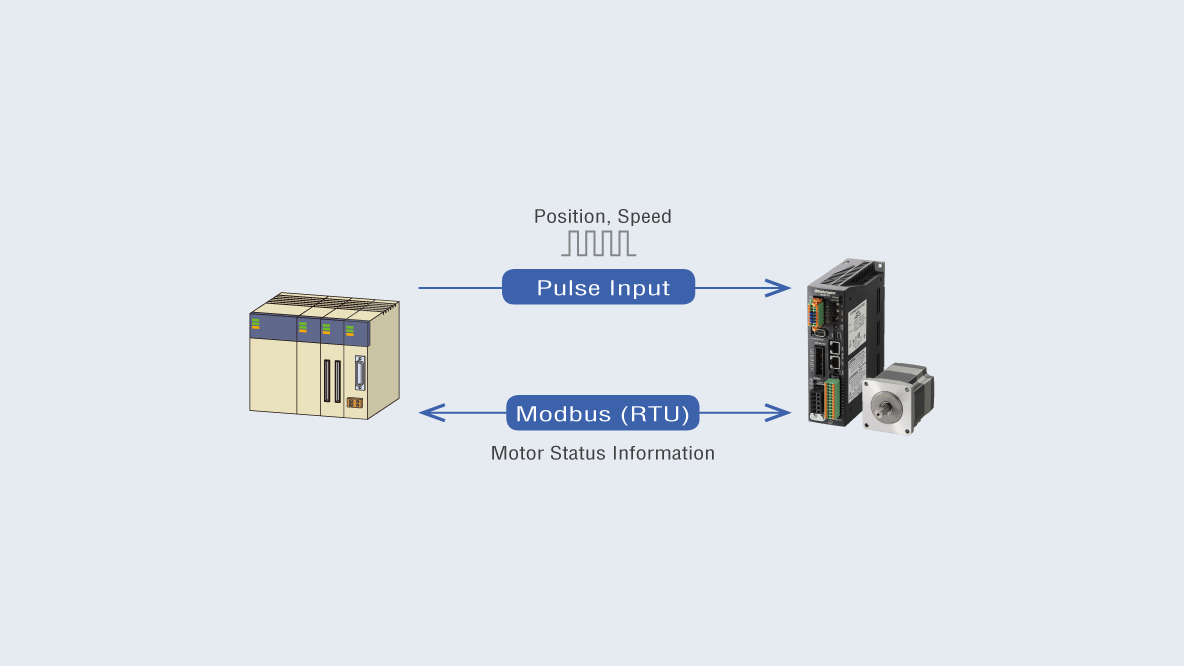
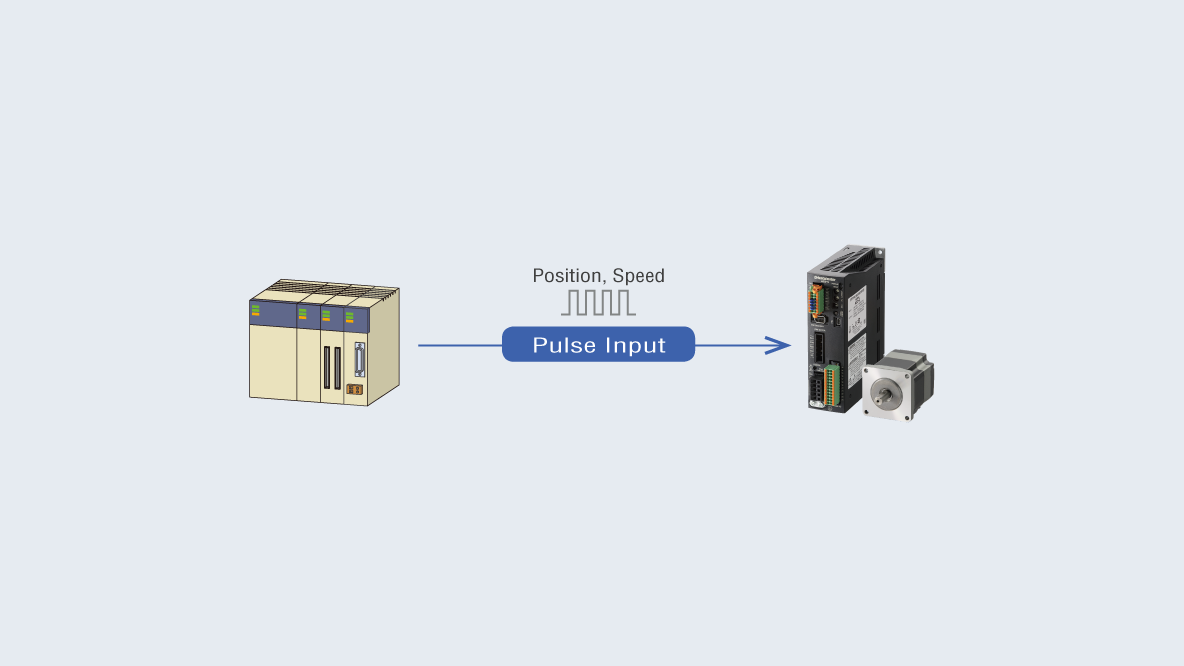
Tipo entrada de pulsos con comunicación RS-485
Ejecuta la operación de acuerdo con la entrada de señal de pulsos al controlador. Controlado por un módulo de posicionamiento (generador de pulsos), etc. Posibilidad de monitorización de la información de estado del motor (posición, velocidad, alarma, etc.) mediante comunicación RS-485.
Tipo de entrada de pulso
Ejecuta la operación de acuerdo con la entrada de señal de pulsos al controlador. Controlado por un módulo de posicionamiento (generador de pulsos), etc.
Con certificación de "seguridad funcional"

La obtención de certificación de "Seguridad funcional *" facilita la implementación de los sistemas de seguridad. Reduce los accesorios, simplifica el cableado y crea un sistema que ahorra espacio.
- *Equipado con función de eliminación de par segura (STO)
Grado de certificación de seguridad funcional SIL 3, PL e
| Estándares aplicables | Nivel de seguridad |
|---|---|
| IEC 61800-5-2, EN 61800-5-2 | SIL 3 |
| IEC 61508-1, EN 61508-1 | |
| IEC 61508-2, EN 61508-2 | |
| ISO 13849-1, EN ISO 13849-1 | PL e (categoría 3) |
Introducción a las ventajas de los productos y aplicaciones certificados
Productos aplicables
Controlador de entrada de CA serie AZ αSTEP
- Compatible con EtherCAT
- Compatible con EtherNet/IP™
- Compatible con PROFINET
- Tipo controlador integrado
- Tipo entrada de pulsos con comunicación RS-485
- Tipo entrada de pulsos
Los certificados se pueden descargar desde la página Detalles del producto.
Para ver las instrucciones de descarga, consulte Preguntas frecuentes sobre la descarga de datos.
Prueba y monitorización mediante software de soporte
Fácil manejo desde PC mediante el software de soporte MEXE02
Mediante el software de soporte MEXE02, se pueden guardar y editar perfiles de movimiento (operation data) y diversos parámetros, así como enseñar y monitorizar diversas situaciones.
Haga clic aquí para descargar el software de soporte
Asistencia integral desde la puesta en marcha hasta el mantenimiento mediante variedad de funciones
-
Puesta en marcha y evaluación
Se proporcionan funciones útiles para la comprobación del cableado y la prueba de operaciones.
- Configuración y almacenamiento de datos de funcionamiento
- Monitorización de E/S
- Enseñanza, funcionamiento remoto
-
Ajuste
Las siguientes funciones están disponibles para ayudarle a ajustar el funcionamiento del motor después de instalar el equipo.
- Monitorización de forma de onda
-
Diagnóstico y mantenimiento
Las funciones de diagnóstico y mantenimiento están disponibles para el diagnóstico y mantenimiento de problemas después de iniciar la operación.
- Monitorización de alarma
- Monitorización de información unidades
- Monitorización de estado
-
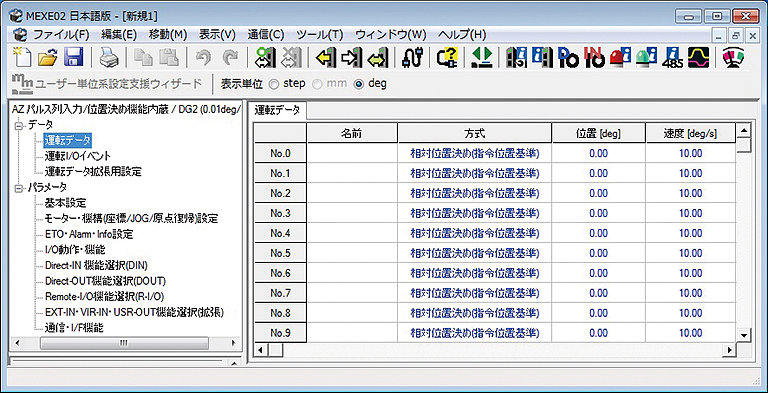
Pantalla de configuración de parámetros/operation data -
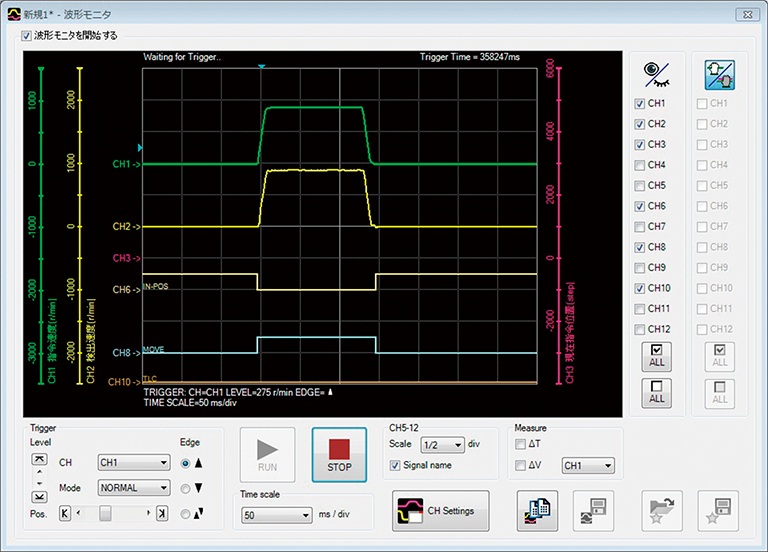
Monitorización de forma de onda
Haga clic aquí para más información sobre las funciones del software de soporte
Narrow down Products
Download
Catálogo



Serie AZ
Motores con reductor FC dimensiones de brida de 35 mm

Manual de instrucciones
Software de soporte

Lineup and Related Information
Datos técnicos (generación de calor del driver)
Datos técnicos (corriente pico de entrada)