Electric Grippers
EH Series
- Achieve Delicate Grasp
- Equipped with Closed Loop Stepper Motor
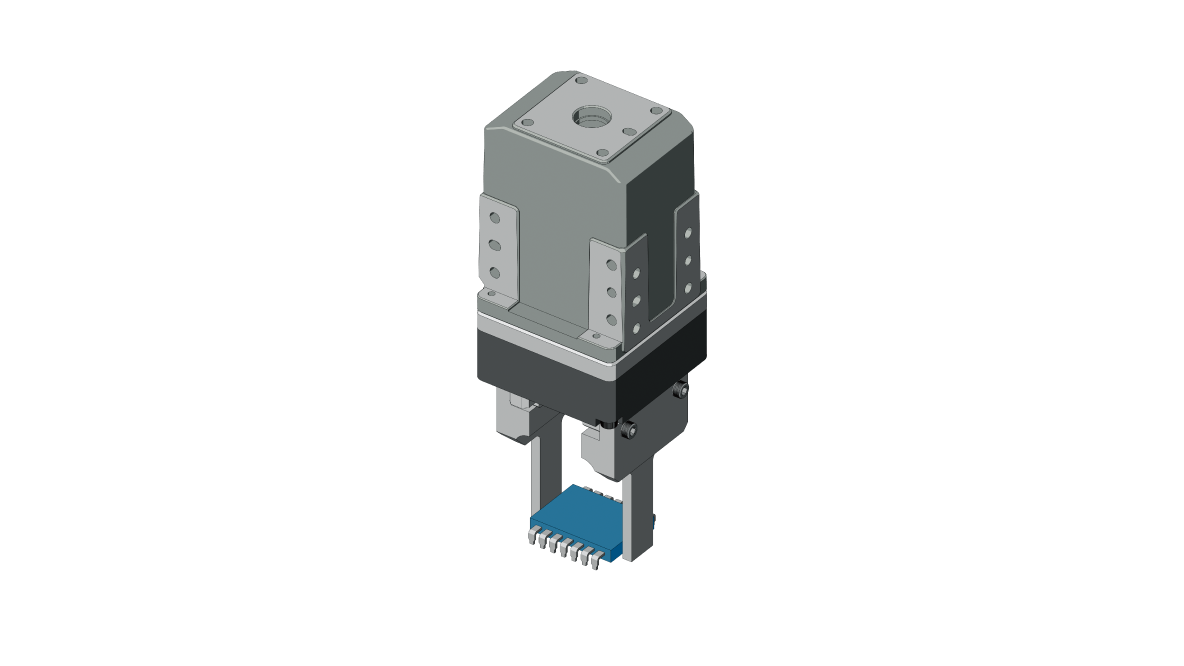
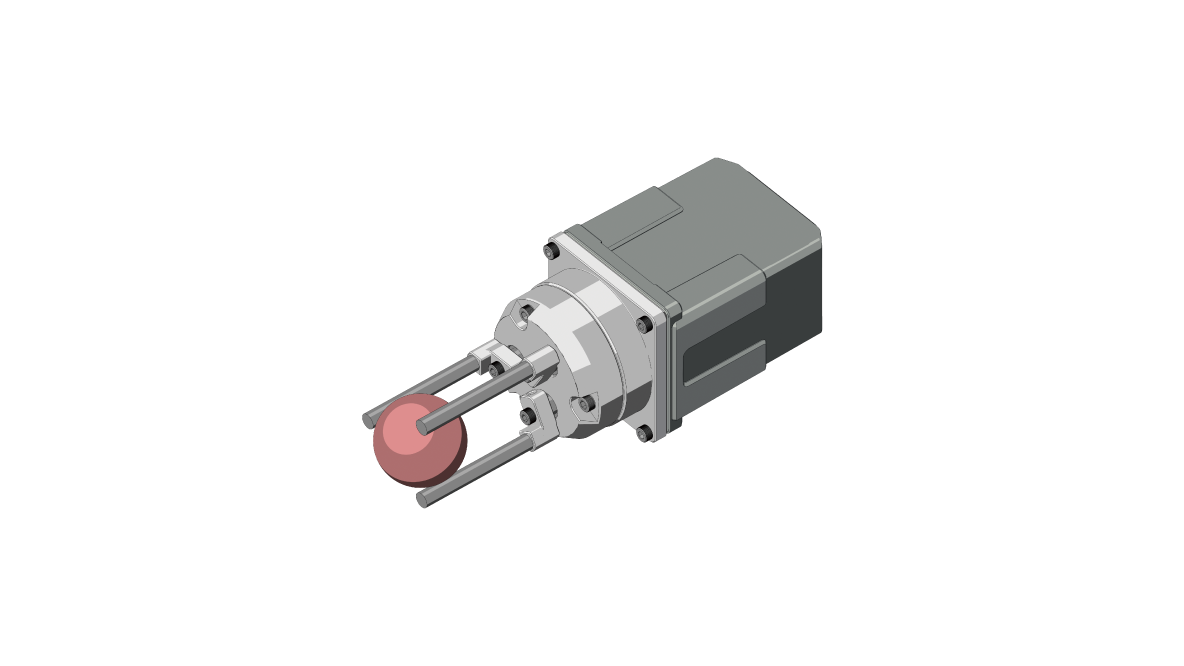
- 2-Finer/3-Finger Type Available
- Maximum Gripping Force 50 N
Features | Electric Gripper EH Series αSTEP AZ Series Equipped
Key Features
A "Delicate Grip" Approach to a Wide Variety of Load
The operating current can be set in 1 % increments, allows fine-tuning the gripping force.
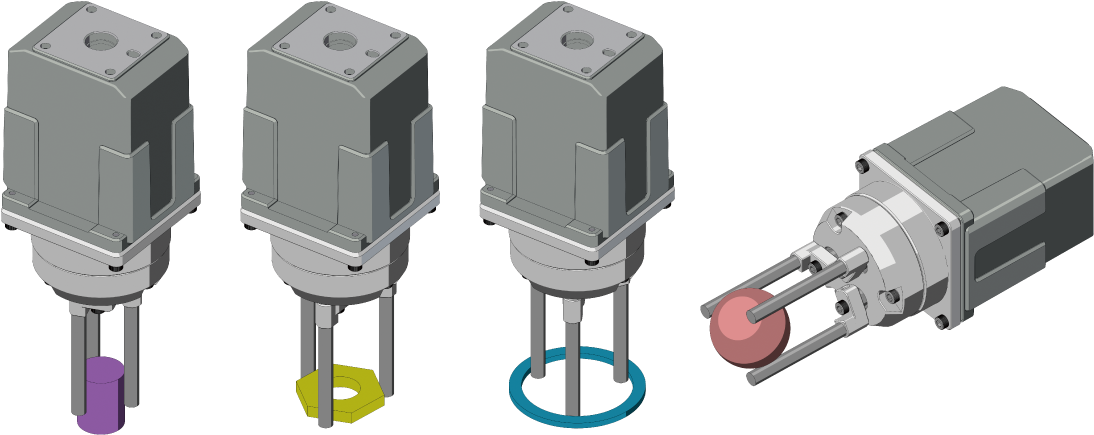
Grasp
Easy-to-damage and easy-to-deform loads can be gripped.
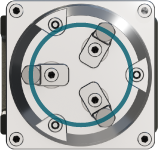
The 3-finger type is suitable for gripping spherical, cylindrical or easily deformable loads.
Align
Loads can be oriented and aligned.
Measure
Load size can be determined and measured.
For Delicate Operations, the EH Series is Recommended Over a Pneumatic Gripper
Adjust the Gripping Force in 1 % Increments (2-Finger and 3-Finger)
Adjustment with a pneumatic gripper's regulator (pressure reducing valve) is unnecessary. The gripping force can be easily and finely adjusted with digital settings.
Adjust the Speed in 0.02 mm/s Increments (2-Finger)
Adjustment with a pneumatic gripper's speed controller (speed control valve) is unnecessary.
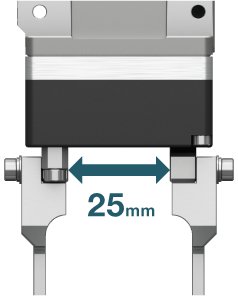
Adjust the Traveling Amount in 0.02 mm Increments (2-Finger)
This gripper takes advantage of the high positioning accuracy of the stepper motor.
Position Monitoring With an ABZO Sensor (2-Finger and 3-Finger)
Detailed position information can be monitored. When using the 2-finger type, position information can also be used to determine the load size.
2-Finger Type and 3-Finger Type Can be Used for Different Applications
Comparison of 2-Finger and 3-Finger Types
| Type | 2-Finger*1 | 3-Finger | ||
|---|---|---|---|---|
| Load Shape Suitable for Gripping |
|
| ||
| Moving Range |
 |
 |
 |
|
| When Open: P.C.D. ϕ30.9 mm |
When Closed: P.C.D. ϕ7 mm |
|||
 |
 |
|||
| Opening Width: P.C.D. ϕ23.9 mm |
||||
| Max. Gripping Force [N] | 25 | 50 | ||
| Permissible Load [N] (Permissible axial load [N]*2) |
5 | 15 | ||
| Mass [kg] | 0.38 | 0.38 (with mounting cover) 0.28 (without mounting cover) |
||
- *1
- The values correspond to the specifications for Model 4.
- *2
- This is for 3-finger type.
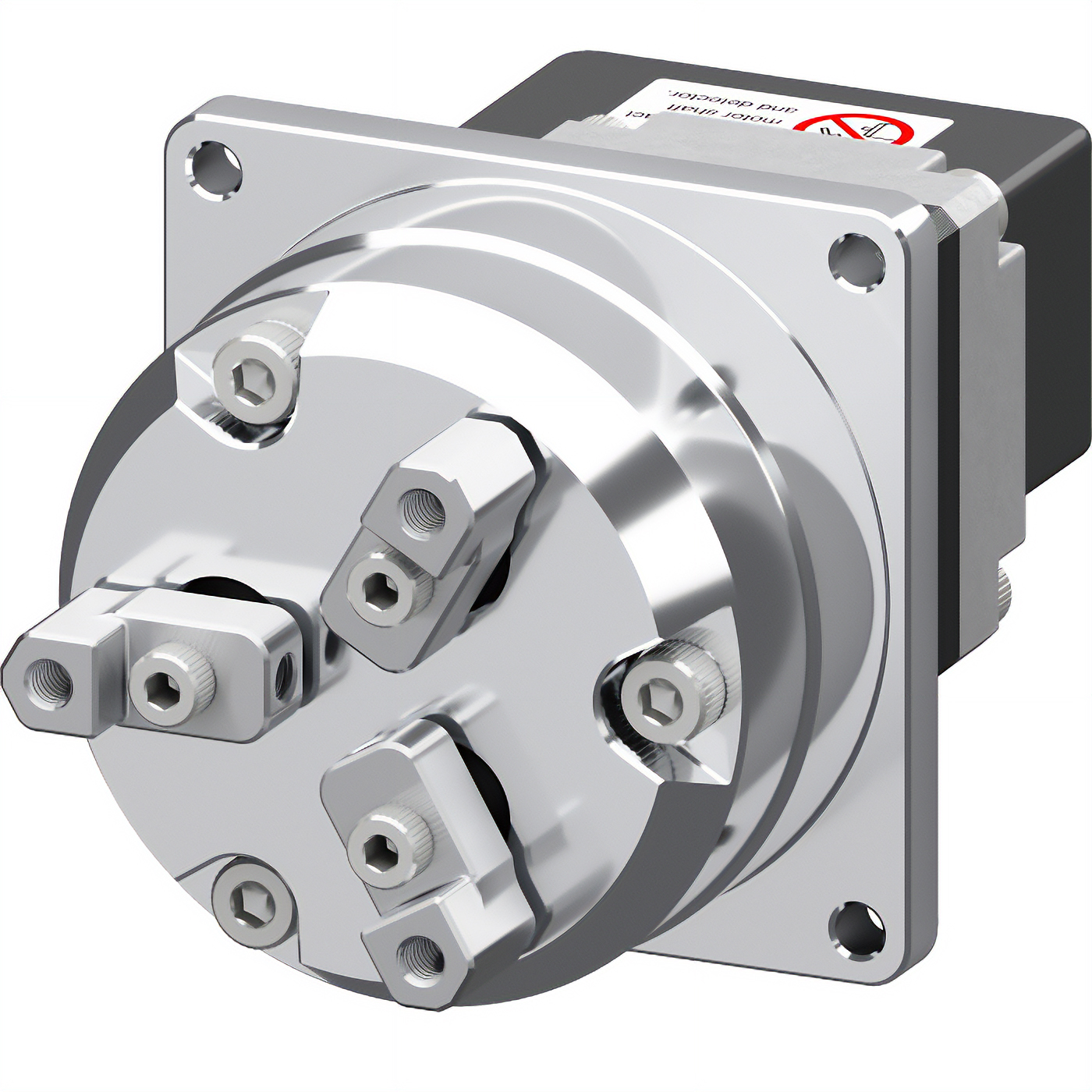
Features of 3-Finger Type
- Due to the large permissible axial load, it is suitable for application with large load masses.
- Each finger opens and closes while rotating.
Advantages of AZ Series Equipped
Equipado con Encoder Absoluto Sin Batería
Está equipado con un pequeño encoder absoluto mecánico sin batería (sensor ABZO). Pudiendo contribuir a la mejora de la productividad y reducción de costes.
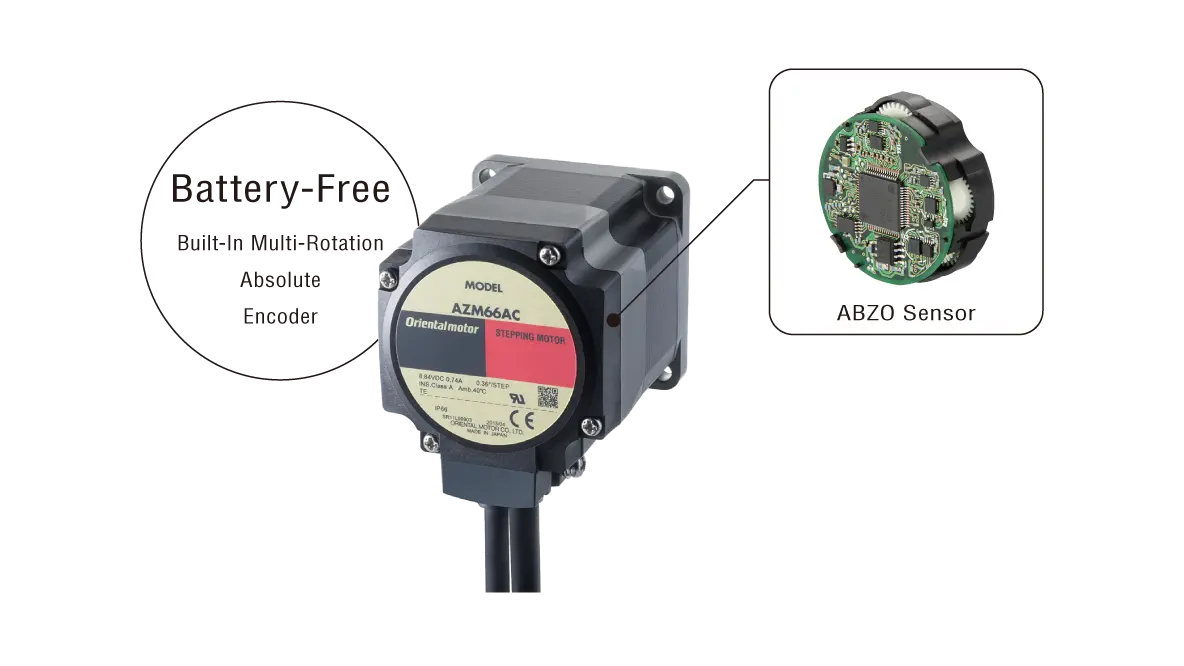
- Sensor de tipo mecánico
Conserva la información de posicionamiento incluso cuando se corta la alimentación - Encoder absoluto multi-vuelta
La detección de posición absoluta es posible en un rango de ±900 (1800) revoluciones del eje del motor desde la posición de inicio
No se requieren sensores externos
Dado que es un sistema absoluto, no se requieren sensores para el referenciado ni de fin de carrera.
Ventajas
- Mejora en el retorno a origen de alta velocidad y la precisión de dicho posicionamiento (Homing).
- Coste reducido
- Cableado sencillo
- No se ve afectado por el fallo de sensores externo
Sin batería
Los sensores mecánicos no requieren baterías.
El sensor ABZO gestiona mecánicamente la información de posicionamiento.
Ventajas
- No es necesario sustituir las baterías
- Posibilidades ilimitadas de instalación del controlador
- Seguro para envíos al extranjero
Simplificación del programa principal mediante la función de secuencia
La serie AZ viene equipada con una amplia variedad de funciones para crear secuencias de operaciones, como ajustes de tiempo durante y en el enlazado de movimientos (linked operation), operación condicional y funcionamiento en bucle (loop operation). (excluyendo algunos modelos)
Se puede configurar con el software de soporte MEXE02, simplificando la programación de secuencias del sistema de control principal.

- Configuración de valores de perfiles de posicionamiento (máx. 256)
- Señales de E/S de propósito general (10 entradas, 6 salidas)
- Señales de E/S de comunicación (16 entradas, 16 salidas)
AZ Series-Equipped Product Line
Since the motors installed are the same, the operating and maintenance methods are the same.
Electric Actuators (AZ Series equipped)
| Electric Linear Slides | Electric Cylinders | Compact Electric Cylinders | Rack-and-Pinion System | Electric Grippers | Hollow Rotary Actuators |
|---|---|---|---|---|---|
| EZS Series | EAC Series | DR Series DRS2 Series |
L Series | EH Series | DGII Series |
- The power supply input of the installed motor differs between Series. Please refer to each series page for the detailed product line.
Driver Features and Product Line
Drivers That Can be Selected to Match the Host Controller
The lineup is available for a variety of controls, systems, and interfaces.
| Driver Type | Compatible Interfaces | Single Axis Driver | |
|---|---|---|---|
| DC Input | |||
 |
|||
| Network Compatible | Drivers are controlled directly from a host control device through industrial network | EtherCAT | ○ |
| EtherNet/IP™ | ○ | ||
| PROFINET | ○ | ||
| Built-in Controller | Operation data is built into the driver. Controllable by Modbus (RTU) and I/O. | Modbus (RTU) I/O |
○ |
| Pulse Input with RS-485 Communication | Controlled by pulse signal. Motor status information can be monitored via Modbus (RTU). | Pulse input Modbus (RTU) |
○ |
| Pulse Input | Controlled by pulse signal | Pulse input | ○ |
- DC input mini drivers and multi-axis driver lineups are also available.
Sencillo control desde PC con el software de soporte MEXE02
Mediante el software de soporte MEXE02, se puede configurar y editar perfiles de movimiento (operation data) y diversos parámetros, además de funciones de teaching y monitorización de estados.
Haga clic aquí para descargar el software de soporte
Soporte integral en puesta en marcha y en mantenimiento gracias a la variedad de funciones
-
Puesta en marcha y evaluación
Se proporcionan funciones útiles disponibles para la comprobación de cableado y prueba de funcionamiento.
- Configuración y almacenamiento de perfiles de movimiento (Operation Data)
- Monitorización de E/S
- Operación remota, teaching
-
Ajuste
Las siguientes funciones están disponibles para ayudarle a ajustar el funcionamiento del motor después de instalar el equipo.
- Monitorización de forma de onda
-
Diagnóstico y mantenimiento
Las funciones de diagnóstico y mantenimiento están disponibles para la resolución de problemas después del inicio de operaciones.
- Monitorización de alarmas
- Monitorización de información de unidades
- Monitorización de estado
-
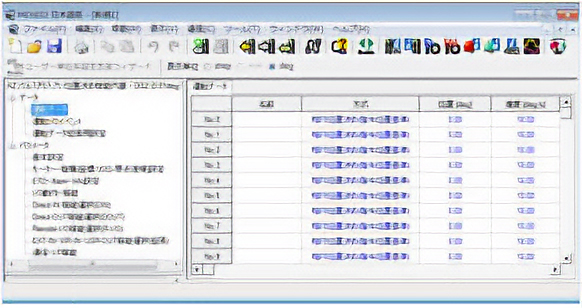
Pantalla de configuración de parámetros/operation data -
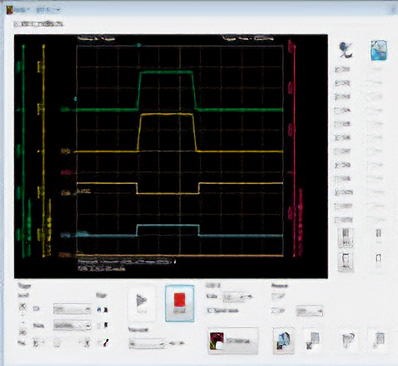
Monitorización de forma de onda
Haga clic aquí para más información sobre las funciones del software de soporte
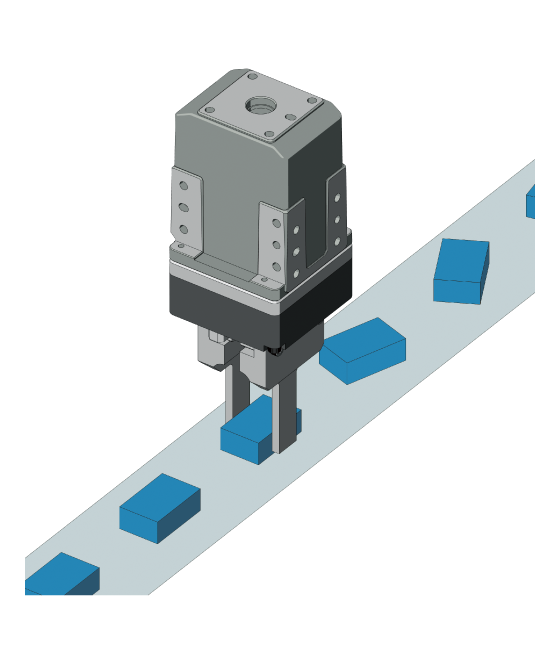
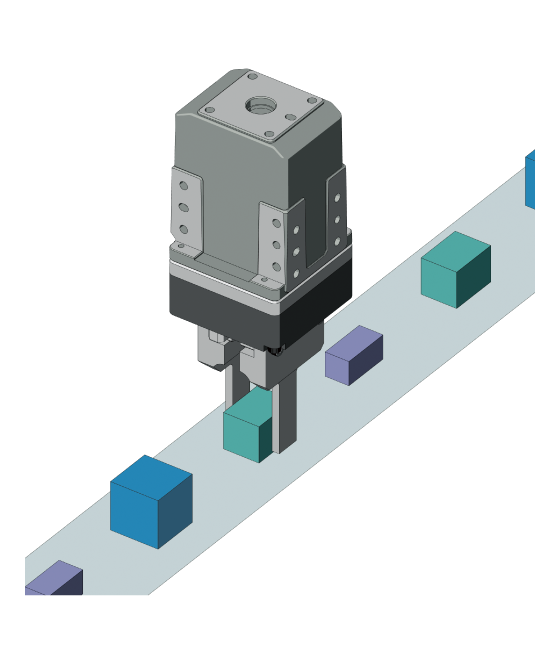
Applications
Using a compact, lightweight EH for the end effector reduces the load on other drive axes. This contributes to reduction of takt time and size.
Use as an End Effector for Robots
For Articulated Robots

For Cartesian Robots

| EH3-AZAKH | EH4-AZAKH | EH4T-AZAK |
|---|---|---|
 |
 |
 |
| W 42.5 mm × D 80.5 mm × H 36 mm | W 48.5 mm × D 91 mm × H 46 mm | W 47 mm × D 90.5 mm × H 46 mm |
| Mass: 200 g | Mass: 380 g | Mass: 280 g |
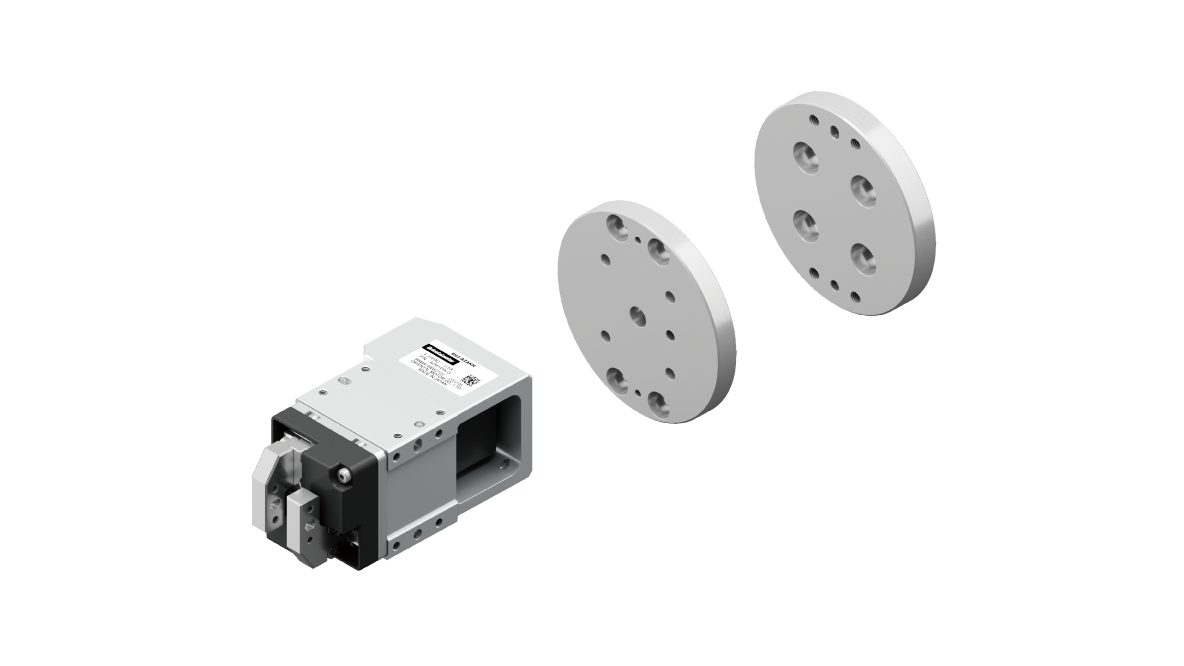
Easy Installation on Commercially Available Industrial Robots
Flanges are available for installing EH Series on commercially available industrial robots (Collaborative robots).
Flanges on the robot side are shaped in accordance with ISO 9409-1 (JIS 8436).

Related Products
Mini controlador serie AZ con alimentación CC
Se trata de un mini controlador diseñado para ser más compacto y ligero que un controlador convencional tipo armario. También es compatible con alimentación por batería, por lo que se puede utilizar, más que antes, en un rango todavía mayor de aplicaciones.
Haga clic aquí para más información

Narrow down Products

