αSTEP

Un motore stepper ibrido che combina i vantaggi del controllo "ad anello aperto" e "ad anello chiuso". Ideale per applicazioni in cui è richiesto un controllo preciso di posizione, velocità e coppia.
Suggestions on Solving Problem With Stepper Motors and Servo Motors
αSTEP
Overview and Related Information
Che cos’è αSTEP?
Che cos’è αSTEP (Alpha step)?
αSTEP è un motore basato su un motore passo-passo con un controllo unico che unisce il controllo ad anello aperto e controllo ad anello chiuso.
I motori passo-passo sono motori capaci di controllare accuratamente l’angolo e la velocità di rotazione in un anello aperto e sono ampiamente utilizzati in vari campi industriali come le apparecchiature di produzione dei semiconduttori e gli analizzatori medicali. αSTEP è stato sviluppato con l’idea di aumentare l’affidabilità dei motori passo-passo con controllo ad anello aperto. Come i servomotori, αSTEP è in grado di fornire un posizionamento e un controllo della velocità ad alta precisione nonché un controllo per limitare al valore desiderato la coppia generata dal motore. La sua coppia elevata nel range di velocità da media a bassa lo rende efficace per il posizionamento a corto raggio. Un’altra caratteristica allettante è l’estesa linea di prodotti caratterizzata da alimentazione DC e dimensioni compatte.
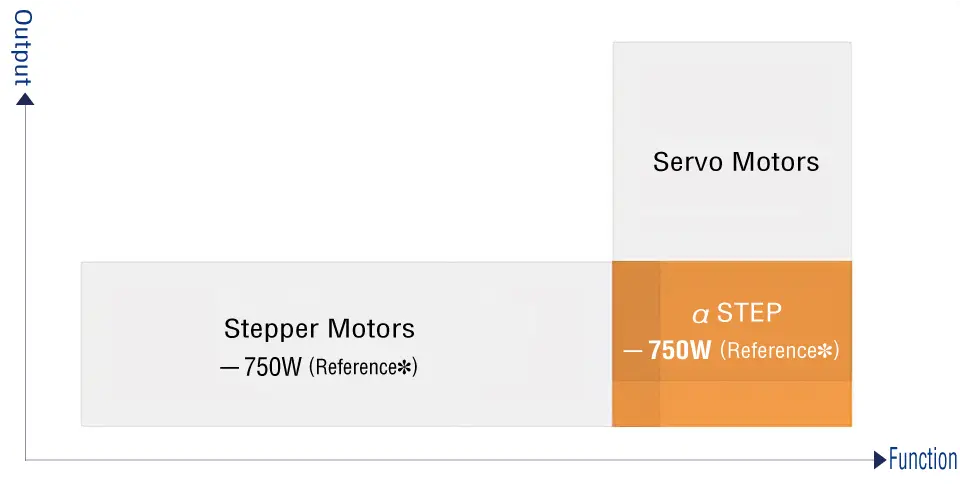
- *La potenza di uscita (W) di un servomotore è indicata come “potenza nominale in uscita” quando funziona a “velocità nominale”. D'altra parte, poiché i motori passo-passo, con la loro caratteristica di posizionamento ad alta precisione e alta coppia a velocità medie e basse, non hanno una “velocità nominale”, non viene specificata alcuna “potenza nominale”. Dal momento che anche la potenza di uscita (W) calcolata in base alla “velocità” cambia, la coppia di un motore in versione standard è mostrata qui come riferimento per determinare quanti W corrispondono alla coppia nominale di un servomotore.
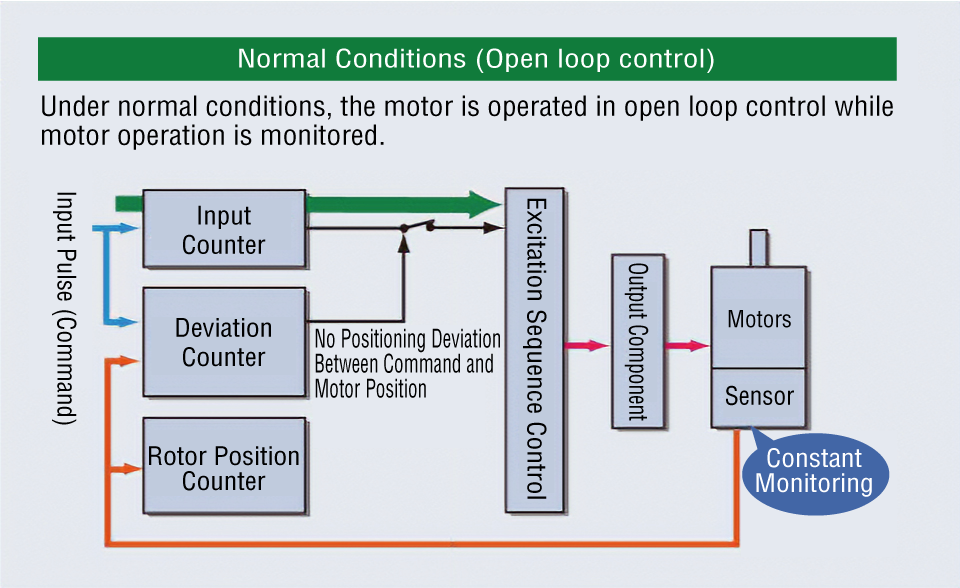
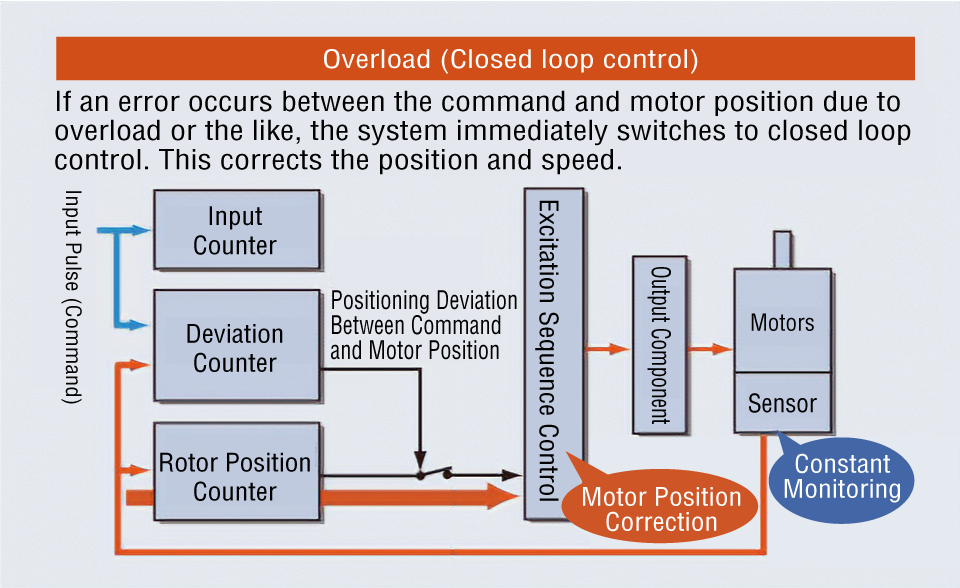
αSTEP passa automaticamente dal controllo ad anello aperto al controllo ad anello chiuso in base alla situazione, monitorando costantemente la posizione e altri fattori. Di solito, come nei motori passo-passo, il movimento è sincronizzato con il comando del controllo ad anello aperto. Se la deviazione della posizione supera ±1.8 ° a causa di un sovraccarico, per compensare, passa al controllo ad anello chiuso come un servomotore.
Storia di αSTEP
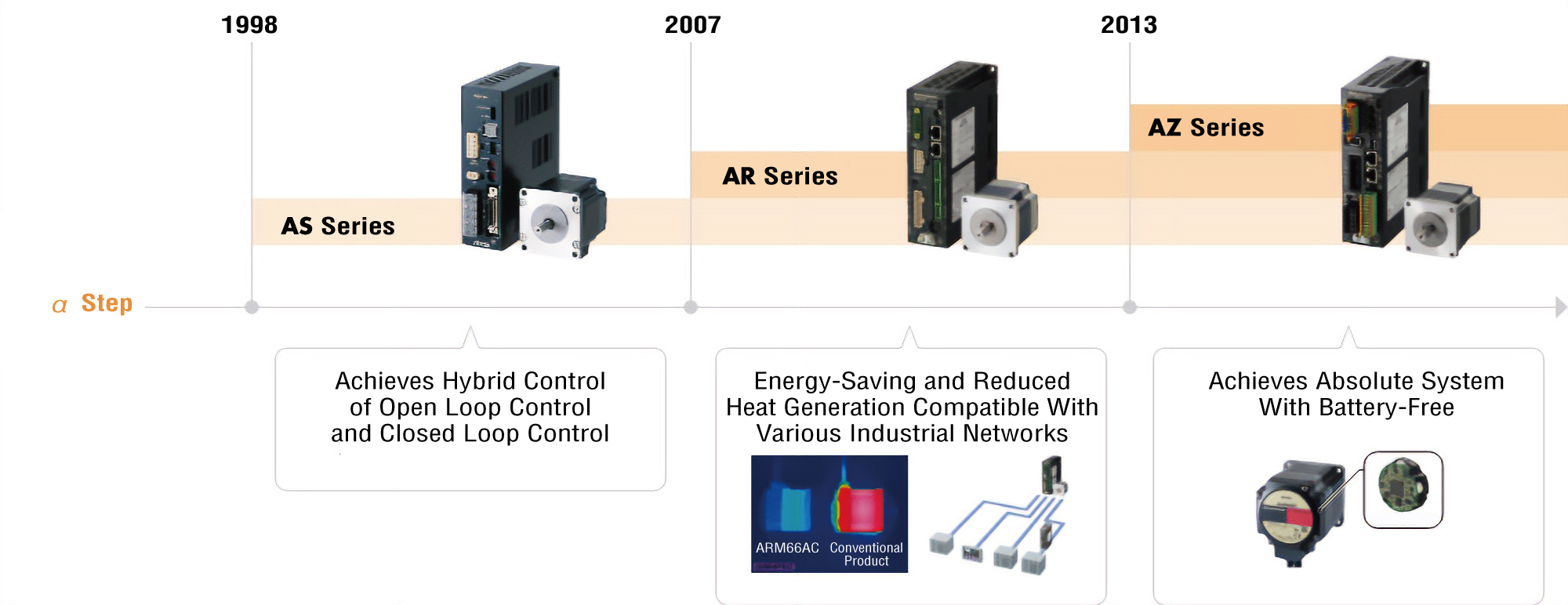
La Serie AS del primo αSTEP è stata lanciata nel 1998. Nel 2007, è stata lanciata la Serie AR per soddisfare le esigenze di risparmio energetico e bassa generazione di calore dei motori e della compatibilità con la rete industriale. È stato riconosciuto come prodotto a risparmio energetico e, nel 2008, gli è stato assegnato il 29° Premio Minister of Economy, Trade and Industry in qualità di apparecchiatura ad eccellente risparmio energetico. In seguito, nel 2013, è stata lanciata la Serie AZ con un encoder assoluto multigiro senza batteria. Da quel momento, si sono potuti creare sistemi assoluti privi di batterie. Pertanto, negli ultimi 20 anni, αSTEP ha continuato a evolvere in risposta ai tempi mutevoli. Oggi, i nostri prodotti sono accolti con favore da molti clienti e usati in un’ampia gamma di applicazioni tra cui l’automazione industriale (Factory Automation, FA), i semiconduttori, le apparecchiature di produzione dei componenti elettronici e le apparecchiature medicali.
Punti di forza di αSTEP
Design
Risposta rapida
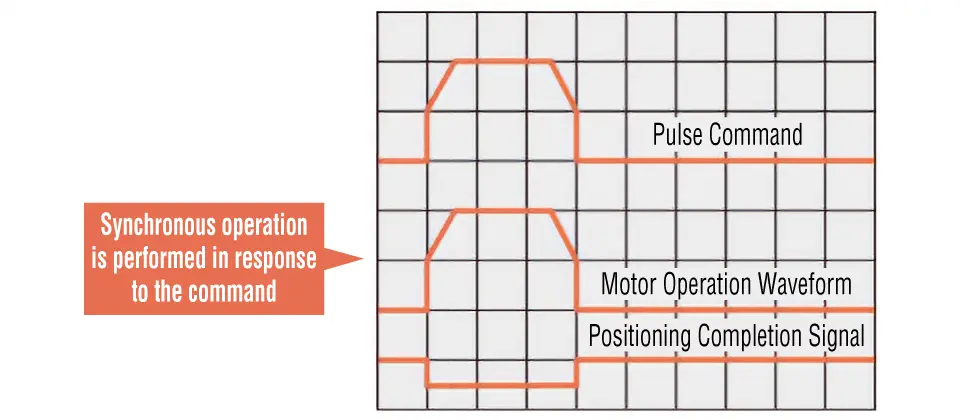
Le brevi distanze possono essere percorse in un tempo breve sfruttando la risposta rapida del motore pass-passo. I motori sono in grado di eseguire comandi senza sfasamenti.
Continua a funzionare anche in presenza di fluttuazione del carico e accelerazione improvvise
La reattività del controllo ad anello aperto, che non presenta sfasamenti di tempo rispetto ai comandi, dà origine a movimenti agili. Le fluttuazioni di carico improvvise sono gestite dal controllo ad anello chiuso. Nell’improbabile eventualità di un’anomalia, viene emesso un segnale di allarme.
Mantiene la posizione di stop senza fenomeno di hunting
Durante il posizionamento, il motore si ferma con la sua propria forza di tenuta senza fenomeno di hunting. Pertanto, è ideale per applicazioni in cui la bassa rigidità del meccanismo richiede assenza di vibrazione nel momento in cui si ferma.
Privo di tuning
Essendo generalmente operato con controllo ad anello aperto, il posizionamento è sempre possibile senza regolazione del guadagno anche quando il carico fluttua a causa dell’uso di un meccanismo di cinghie, una camma o una trasmissione a catena ecc.
Risparmio energetico
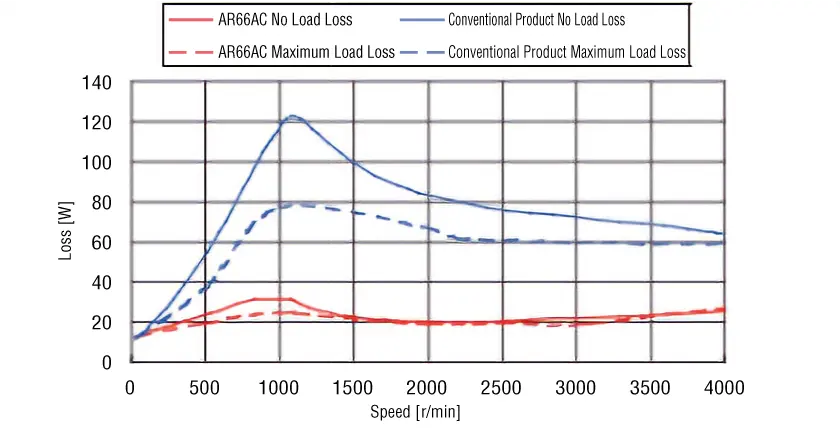
Riduzione della perdita del motore
Abbiamo riesaminato i materiali del nucleo di ferro utilizzati nel motore e ottimizzato il circuito magnetico e gli avvolgimenti dello statore. Nella zona intorno ai 1000 giri/min, dove le perdite raggiungono il picco, la perdita a vuoto è stata ridotta di circa 90 W, passando da 120 W a 30 W, rispetto al prodotto convenzionale. Anche la perdita alla massima potenza (fattore di carico del 100%) è stata ridotta da 80 W a 25 W, con una riduzione di circa 55 W.
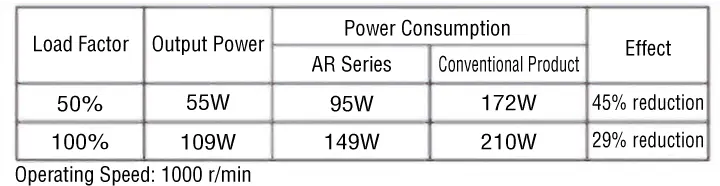
Riduzione del consumo di energia del driver
Il controllo PWM del driver è stato migliorato per ridurre le perdite in modo significativo. Anche il consumo di energia del motore e del driver come unità combinata è ampiamente ridotto. La tabella sulla destra mostra un confronto relativo al consumo di energia a 1000 r/min e indica che a un fattore di carico del 50% si ottiene un risparmio energetico del 45% rispetto ai modelli tradizionali.
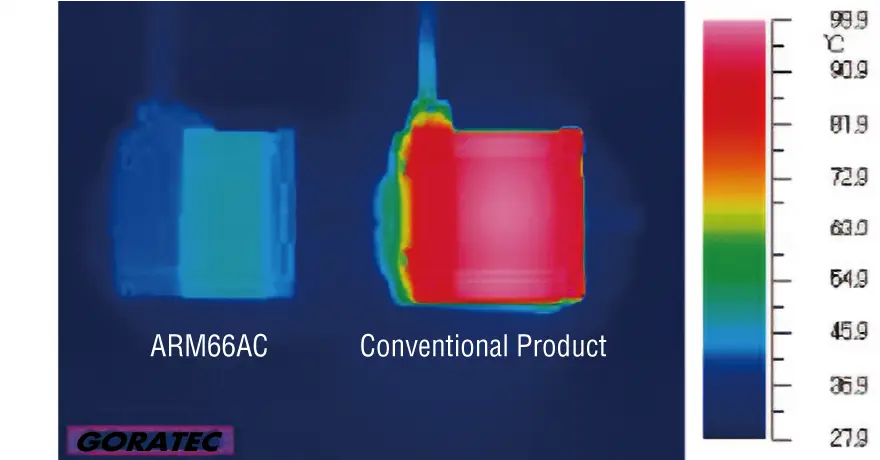
Minore Generazione di Calore del Motore
La riduzione del consumo di energia comporta simultaneamente una minore generazione di calore da parte del motore. Nei prodotti convenzionali, con una temperatura ambiente di 25 °C e una velocità di rotazione di 1600 giri/min, la temperatura del rivestimento esterno raggiunge circa 100 °C nelle condizioni di funzionamento di 2 secondi di attività e 3 secondi di arresto. L'ARM66AC, invece, presenta una temperatura del rivestimento esterno di circa 50 °C nelle stesse condizioni, riducendo l’aumento di temperatura a un terzo.
Linea di prodotti
Oltre ai motori in versione standard, abbiamo motoriduttori e attuatori elettrici che combinano motori e componenti meccanici. Sono disponibili driver con alimentazione AC (100 V-240 V) e alimentazione DC (24 VDC/48 VDC). Sono disponibili anche molti prodotti compatibili con varie reti industriali. Scegliere motori e driver della stessa serie dello stesso dispositivo permette di consolidare i componenti usati per il cablaggio, il controllo e la manutenzione, riducendo così il tempo e lo sforzo necessari per l’avvio.

Disponibilità
Supporto Globale Normative Internazionali
I prodotti sono disponibili con specifiche di tensione per sistemi monofase a 100 VAC / 200 VAC, trifase a 200 VAC e con ingresso in corrente continua, consentendone l’utilizzo nei principali paesi del mondo. Ogni serie è certificata secondo le norme UL/CSA, conforme alle norme EN e riporta il marchio CE.
Risultati dell’adozione
αSTEP non è solo in grado di controllare il posizionamento ad alta precisione e di regolare la velocità, ma anche di limitare la coppia generata dal motore a un determinato valore. La sua coppia elevata nel range di velocità da media a bassa lo rende efficace per il posizionamento a corto raggio. Un’altra caratteristica allettante è l’estesa linea di prodotti caratterizzata da alimentazione DC e dimensioni compatte. E’ stato impiegato in un'ampia gamma di applicazioni in cui queste caratteristiche possono essere valorizzate. Di seguito alcuni esempi di utilizzo, insieme alle principali ragioni per cui sono stati adottati.
FA (Factory automation)
La macchina è usata per l’automazione in stabilimenti che richiedono molte movimentazioni come trasportare, spingere, tirare e afferrare. Supportiamo le movimentazioni di cui avete bisogno con varie reti industriali e attuatori elettrici.
Apparecchiature per la fabbricazione di Semiconduttori
Si usa da molti anni nelle apparecchiature per la fabbricazione di Semiconduttori che richiedono una precisione a livello di micron. La vibrazione è eliminata non solo durante il trasporto ma anche in condizione di arresto.
Stadi di precisione

αSTEP è usato per stadi di precisione che devono effettuare movimenti precisi in una determinata posizione. Il posizionamento ad alta precisione viene ottenuto in una varietà di apparecchiature come analizzatori e dispositivi di ispezione.
Apparecchiature mediche di erogazione e analizzatori

Da molti anni, i nostri prodotti sono stati ritenuti affidabili per l’uso nel campo delle apparecchiature mediche, dove sono richieste caratteristiche di particolare affidabilità e qualità.
Il controllo ad anello chiuso emette un allarme in caso di emergenza e avvisa l’utilizzatore in presenza di anormalità nella rotazione del motore.
Macchinari di pesatura e confezionamento alimentare

I nostri prodotti sono impiegati nei macchinari di pesatura e confezionamento che richiedono apparecchiature con un’elevata velocità di elaborazione. La loro potenza è dimostrata dal posizionamento ripetitivo con corse brevi, in casi come l’apposizione di etichette, e contribuisce a un tempo ciclo dell’apparecchiatura inferiore.
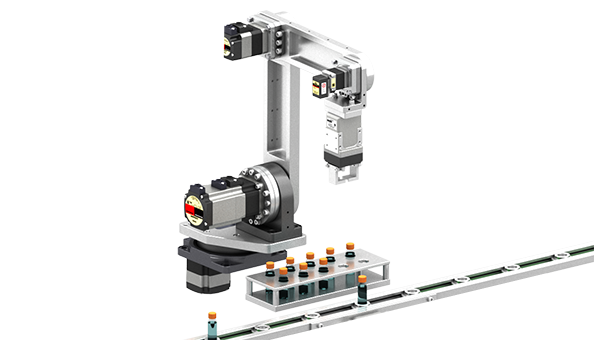
Robot interni
Negli ultimi anni, l’impiego dei nostri prodotti per i robot interni è aumentato. Contribuisce alla compattezza e alla leggerezza nonché al monitoraggio delle condizioni e alla limitazione della coppia richiesti per i robot.
Esempi di produzione interna di apparecchiature
Usiamo αSTEP anche in apparecchiature interne nei nostri siti di produzione. Oltre alla struttura e alla configurazione del sistema dell’apparecchiatura, in ciascun asse sono spiegati aspetti importanti per la scelta del prodotto.
Abbiamo una pagina che fornisce informazioni sulla nostra assistenza dalla progettazione dell’apparecchiatura fino all’avvio.

Rispondere alle esigenze dei robot
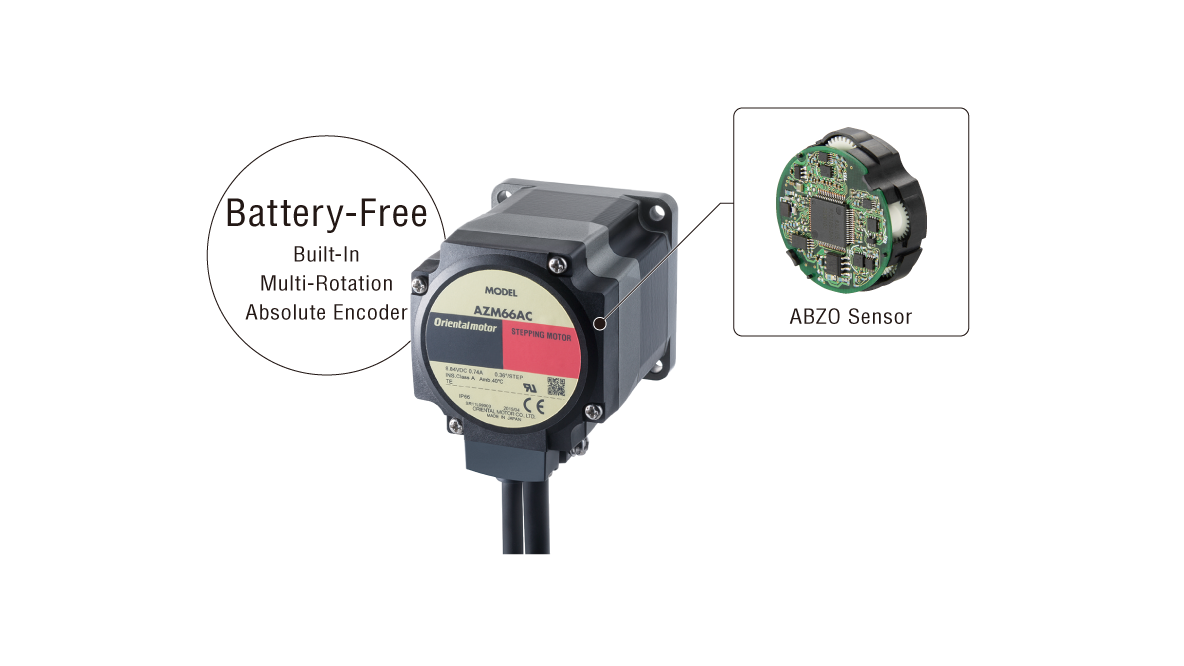
A fronte dello scenario di scarsità di risorse umane, recentemente si è assistito a una crescita della domanda di “robot che possano sostituire il lavoro umano”. Esistono anche sempre più situazioni in cui le aziende iniziano a considerare la costruzione interna di robot più piccoli che possano svolgere il lavoro di linea necessario. La Serie AZ αSTEP è dotata di un sistema assoluto che elimina la necessità di una batteria, nonché di un motore di controllo compatto per soddisfare le esigenze della miniaturizzazione dei robot e dell’auto-produzione.
Gli encoder meccanici assoluti multigiro riducono l’uso di sensori ed eliminano le batterie
Con la Serie AZ αSTEP, i sensori esterni come l’homing possono essere ridotti, permettendo così una configurazione compatta con meno cavi. L’encoder meccanico assoluto multigiro [ABZO] conserva le informazioni sulla posizione anche se l’alimentazione è interrotta durante l’operazione di posizionamento a causa di un arresto di emergenza o di un’interruzione di corrente. Essendo meccanico, non richiede una batteria per conservare i dati. Non c’è da preoccuparsi per il costo delle batterie da acquistare, per i problemi che si verificano durante il funzionamento o per i periodi da dedicare alla manutenzione. Inoltre, i motori della Serie AZ stessi possono sostituire i sensori e convertire lo status del robot in valori numerici.
Monitoraggio dello status di robot per un controllo ottimale
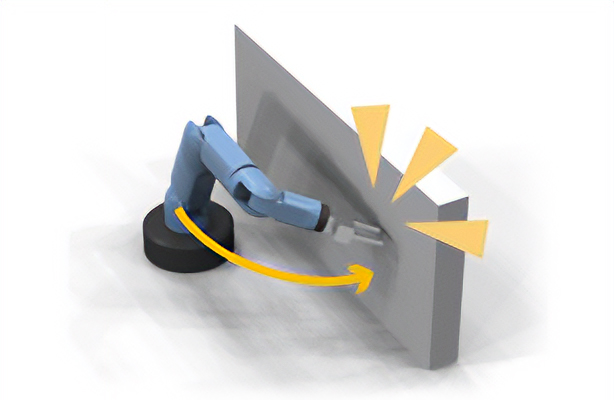
Coppia non eccessiva
La coppia di uscita può essere limitata per prevenire danni al meccanismo e al motore. È emesso anche un segnale TLC quando viene raggiunto il valore limite impostato, che può essere rilevato e usato dal PLC.
Rilevamento di anormalità e arresto prima degli allarmi
Usando le informazioni su coppia e posizione, è possibile rilevare anormalità prevedibili prima che gli allarmi si registrino. Il sistema può anche essere configurato per portare segnali di uscita al controllore host per arresti immediati.
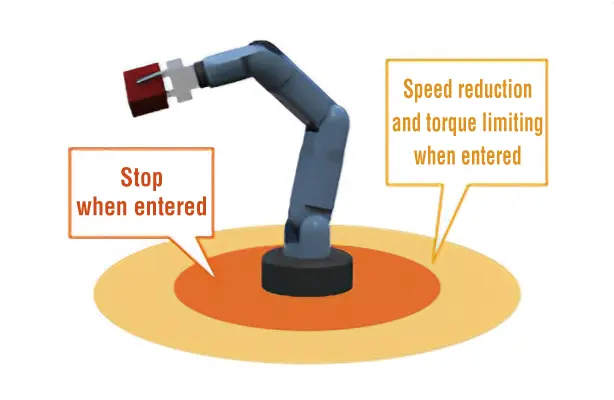
Restrizioni di velocità e coppia per ciascuna area operativa
I segnali possono essere ingressi basati su informazioni provenienti da fonti esterne come sensori di area e le operazioni possono passare ai livelli di coppia e velocità predefiniti.
Capace di monitorare e raccogliere una serie di stati del motore.
Alcuni status nel feedback possono emettere un segnale quando viene raggiunto un valore di soglia predefinito. Questo può essere usato per fare manutenzione preventiva e per aumentare la sicurezza dell’apparecchiatura.
Monitoraggio della temperatura del motore
È possibile monitorare in tempo reale la temperatura del motore del robot.

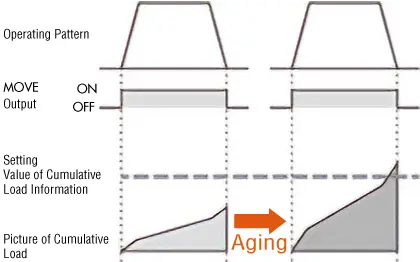
Monitor del carico cumulativo
Il fattore di carico del motore può essere accertato in base all’area e rilevato come un valore. Ciò è utile quando si vogliono conoscere i cambiamenti a lungo termine del carico, come il deterioramento nel tempo.
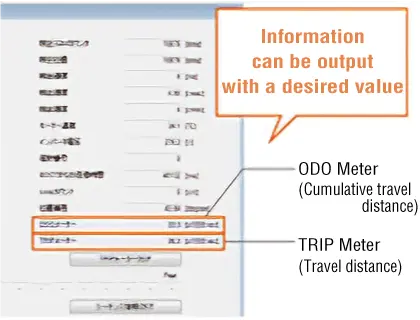
Monitor ODO/TRIP
Permette di monitorare il numero totale di rotazioni del motore. Può essere usato per manutenzione ecc.
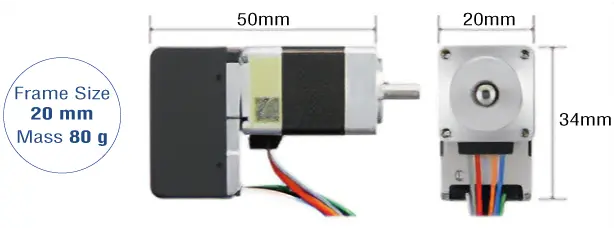
Linea di prodotti di motori compatti e leggeri che riducono il carico sulle punte del meccanismo del robot
È disponibile un’ampia gamma di motori e attuatori compatti e leggeri. Contribuisce anche a ridimensionare il robot e a ridurre il carico su ciascun asse del braccio quando è usato per gli effettori finali.
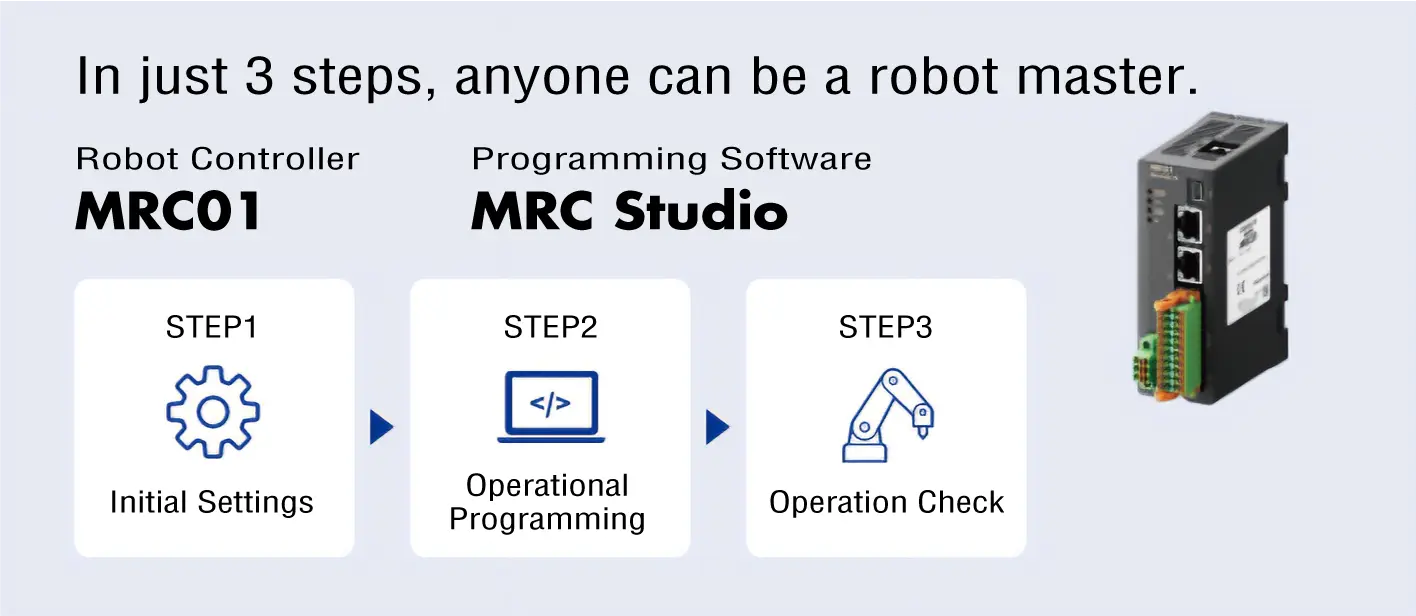
Prodotti correlati
Offriamo anche un robot controller che vi consente di impostare, programmare e far funzionare facilmente il robot che avete creato con la Serie AZ αSTEP.
Linea di prodotti
Linea di prodotti αSTEP
Serie AZ αSTEP
-
Encoder meccanico assoluto multigiro
Il rilevamento della posizione assoluta è possibile con ±900 giri (1800 giri)* dell’albero motore dalla posizione iniziale di riferimento.- *±450 giri (900 giri) per prodotti con dimensioni della flangia di 20 mm, 28 mm (30 mm).
- Senza batteria
Poiché le informazioni sul posizionamento sono gestite meccanicamente dal sensore ABZO, queste possono essere mantenute, anche se l’alimentazione si spegne o se il cavo tra il motore e il driver è disconnesso.

Linea di prodotti
| Serie | Serie AZ | |
|---|---|---|
| Caratteristiche |

|
|
| Sensore di posizione |
ABZO (Encoder assoluto multigiro senza batteria) 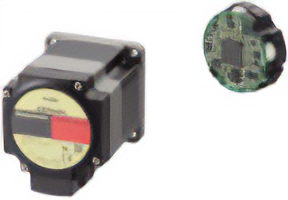
|
|
| Risoluzione del motore | 3,6˚~0,036˚ | |
| Metodo homing | Pushing | ○ |
| Sensore esterno | ○ | |
| Sistema assoluto | Nessuna batteria necessaria | |
| Funzionamento continuo | △ (Possibile fino a una temperatura del sensore del motore di 85 °C) |
|
| Versione motore |
Versione standard |
|
| Versione attuatore |
Slitte lineari elettriche |
|
| Versione driver |
Ingresso a treno d’impulsi |
|
| Rete compatibile |
EtherNet/IP™ |
|
| Funzione di sequenza | ○ | |
| Funzione di rimozione dell’alimentazione | ○ | |
| Funzione di raccolta dei dati | ○ | |
Versioni di motore/attuatore
Linea di prodotti motore/motoriduttore
È disponibile un’ampia gamma di motori, dal motore più piccolo del settore con dimensioni della flangia di 20 mm a vari motoriduttori. la versione ottimale può essere scelta tra i vari motoriduttori in base a coppia, precisione (gioco) e prezzo.
Versione standard
Dimensioni della flangia 20 mm~85 mm

Ingranaggio TS/TH(Riduttore ad ingranaggio cilindrico)
Dimensioni della flangia 42 mm~90 mm
Motoriduttore angolare FC
(Riduttore con ingranaggio a corona dentata)
Dimensioni della flangia 42 mm, 60 mm

Versione con riduttore PS
(Riduttore a ingranaggi planetari)
Dimensioni della flangia 28 mm~90 mm
Versione con riduttore HPG![]() (Harmonic Planetary®)
(Harmonic Planetary®)
Dimensioni della flangia 40 mm~90 mm

Riduttore armonico![]() (Harmonic Drive®)
(Harmonic Drive®)
Dimensioni della flangia 30 mm~90 mm
Linea di prodotti attuatori elettrici equipaggiati con αSTEP
Oriental Motor vanta una gamma di attuatori elettrici, che consistono di motori e componenti meccanici, per soddisfare le esigenze di varie apparecchiature automatizzate. Motori e attuatori hanno la medesima usabilità. Scegliendo prodotti equipaggiati con la Serie AZ, è possibile rinunciare ai sensori elettrici, riducendo il carico di lavoro per elettricisti e personale di manutenzione.

Slitte lineari elettriche

Cilindri elettrici
Cilindri elettrici compatti

Attuatori rotanti cavi

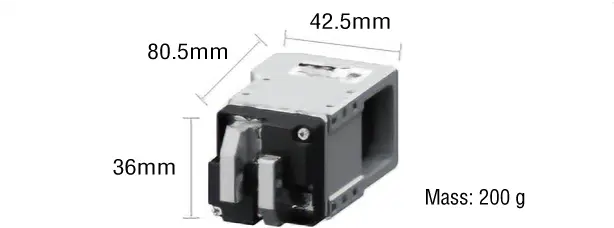
Pinze elettriche

Sistema a pignone e cremagliera
Tipo di driver
Driver compatibili con la rete industriale
Sono disponibili prodotti che supportano, rispettivamente, EtherNet/IP, PROFINET e EtherCAT.
Viene usato un singolo cavo di comunicazione per connettere il driver al dispositivo di controllo host, risparmiando in questo modo sui cavi.

- Driver compatibili con EtherNet/IP
- Driver compatibili con PROFINET
- Driver compatibili con EtherCAT
- Driver multiasse compatibili con EtherCAT
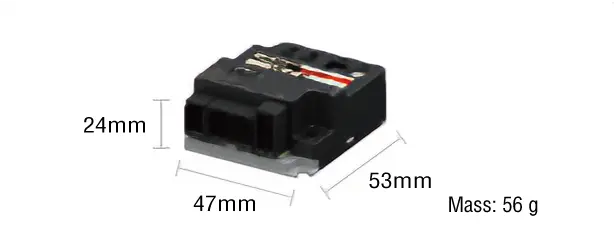
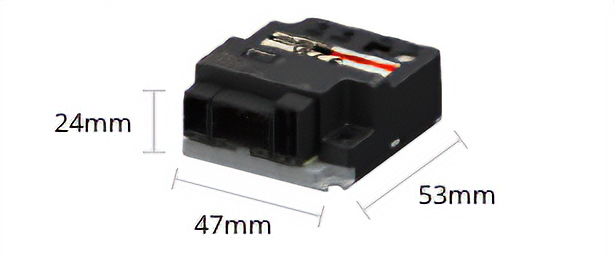
Mini driver Serie AZ αSTEP
Questo driver compatto può essere controllato tramite comunicazione RS-485. L’eliminazione dello switch e del connettore I/O ha permesso di creare un driver più piccolo e leggero. Design compatto per l’installazione in spazi stretti. Pesando solo 56 g, il design leggero riduce la coppia di carico e l'inerzia anche quando installato in parti in movimento, contribuendo a una maggiore flessibilità nel design meccanico e nel quadro di controllo.
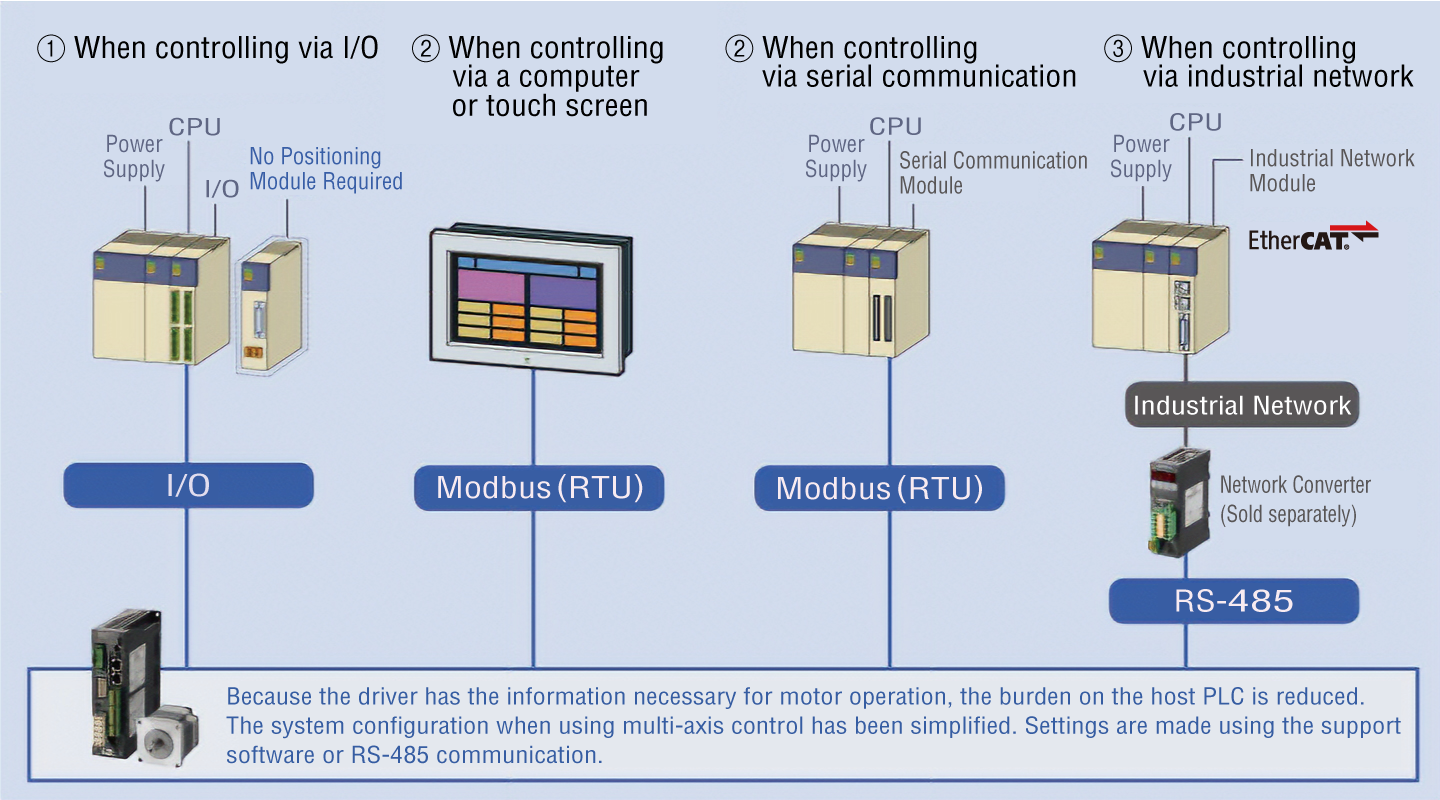
Modello di driver con posizionatore integrato
In questa versione, i dati di funzionamento sono impostati nel driver, poi selezionati ed eseguiti dal sistema host. La connessione del sistema host e il controllo sono eseguiti tramite uno tra: I/O, comunicazione Modbus (RTU)/RS-485 o una rete industriale. Utilizzando il convertitore di rete (venduto separatamente), sono possibili comunicazioni CC-Link, MECHATROLINK e EtherCAT
Driver con ingresso treno di impulsi
Esegue il funzionamento in base all’ingresso del segnale a treno di impulsi al driver. Il controllo del motore è eseguito da un modulo di posizionamento (generatore di impulsi) fornito dal cliente.
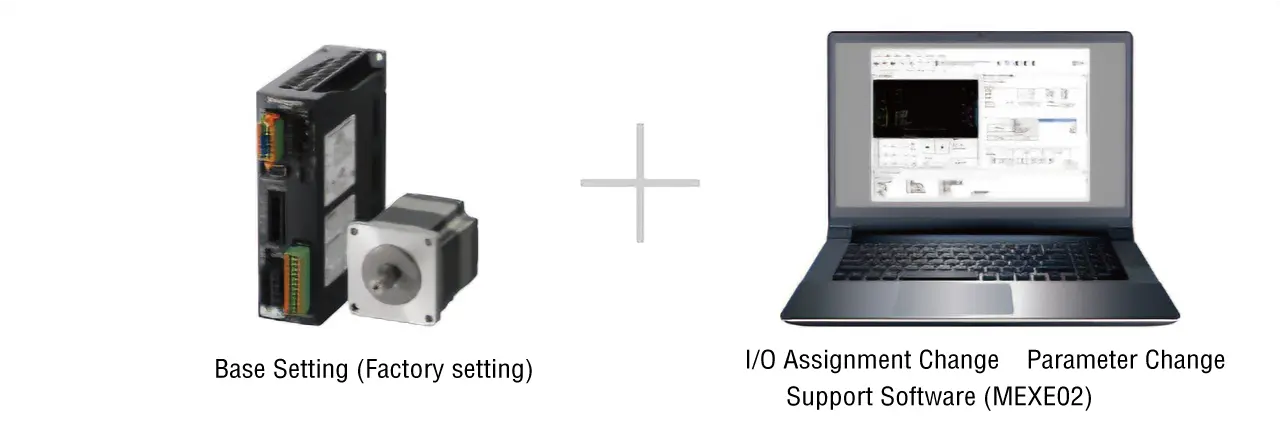
Il software di supporto (MEXE02) può anche essere usato per controllare la cronologia dell’allarme e monitorare le informazioni sullo status.
Per chi non ha ancora scelto una Serie
Guida alla selezione
Questa Guida alla selezione vi aiuterà a trovare la Serie di prodotti più adatta alla vostra apparecchiatura. Selezionate un esempio di un’apparecchiatura e seguite le istruzioni per scegliere una Serie di prodotti.
Maggiori informazioni

Casi di studio per la risoluzione dei problemi
Ecco le informazioni sulle soluzioni ai problemi della vostra apparecchiatura. Vi illustriamo degli esempi di produzione interna di apparecchiature utilizzate in siti di produzione reali nonché esempi di applicazione dei nostri prodotti consigliati per risolvere i problemi delle apparecchiature tradizionali.
Maggiori informazioni