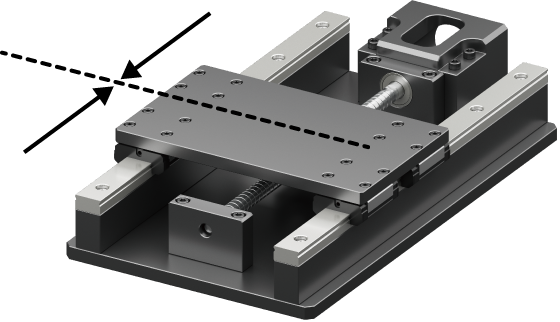
At the start of positioning, open loop control is performed by taking advantage of the high response of the stepper motor, and position correction is performed using feedback from an external sensor once the position command is completed.
High Precision Positioning
The difference in the feedback position relative to the command position is corrected by a fully closed-loop control that directly feeds back the position within the mechanism. It contributes to the design of equipment that requires submicron high-precision positioning.
Reference
Lost Motion*1 Measured Data
Open Loop
Fully Closed-Loop
0.51 μm
0.15 μm (target accuracy within ±0.2 μm)
Measurement Conditions
Feed screw lead 1 mm
Linear scale resolution 0.1 μm
In-Position Range: 1 cnt*2
Measured using laser measuring equipment
*1 This is the difference between the motor positioning in the CW and CCW directions relative to the target position and the stop position in the rotation direction.
*2 Position is corrected with a target error of 1 count of encoder pulses (-0.2~0.2 μm).
Linear Scale Resolution
Stepper motor eliminates the need for gain adjustment and hunting
No Need for Gain Adjustment No need for gain adjustment to match the mechanism as is the case with servo motors. Since positioning operation does not always use encoder feedback, there is no need to adjust belt pulleys, cams, etc. to suit the mechanism and load.
Holding the Stop Position Without Hunting When positioning is completed, the motor stops by its own holding force without hunting. This is ideal for applications where vibration when stopping is a problem.
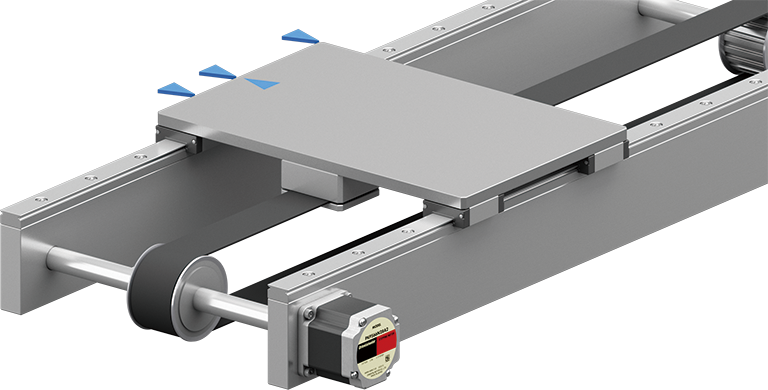
Compatible with various external sensors to match the mechanism
Various types of sensors from various companies are supported, and feedback from the sensor type appropriate for the mechanism can be used.
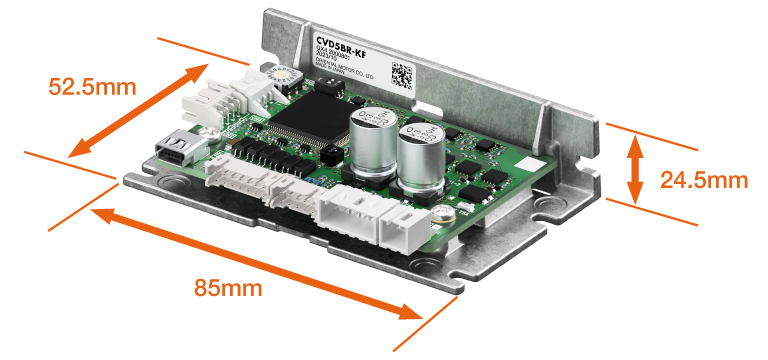
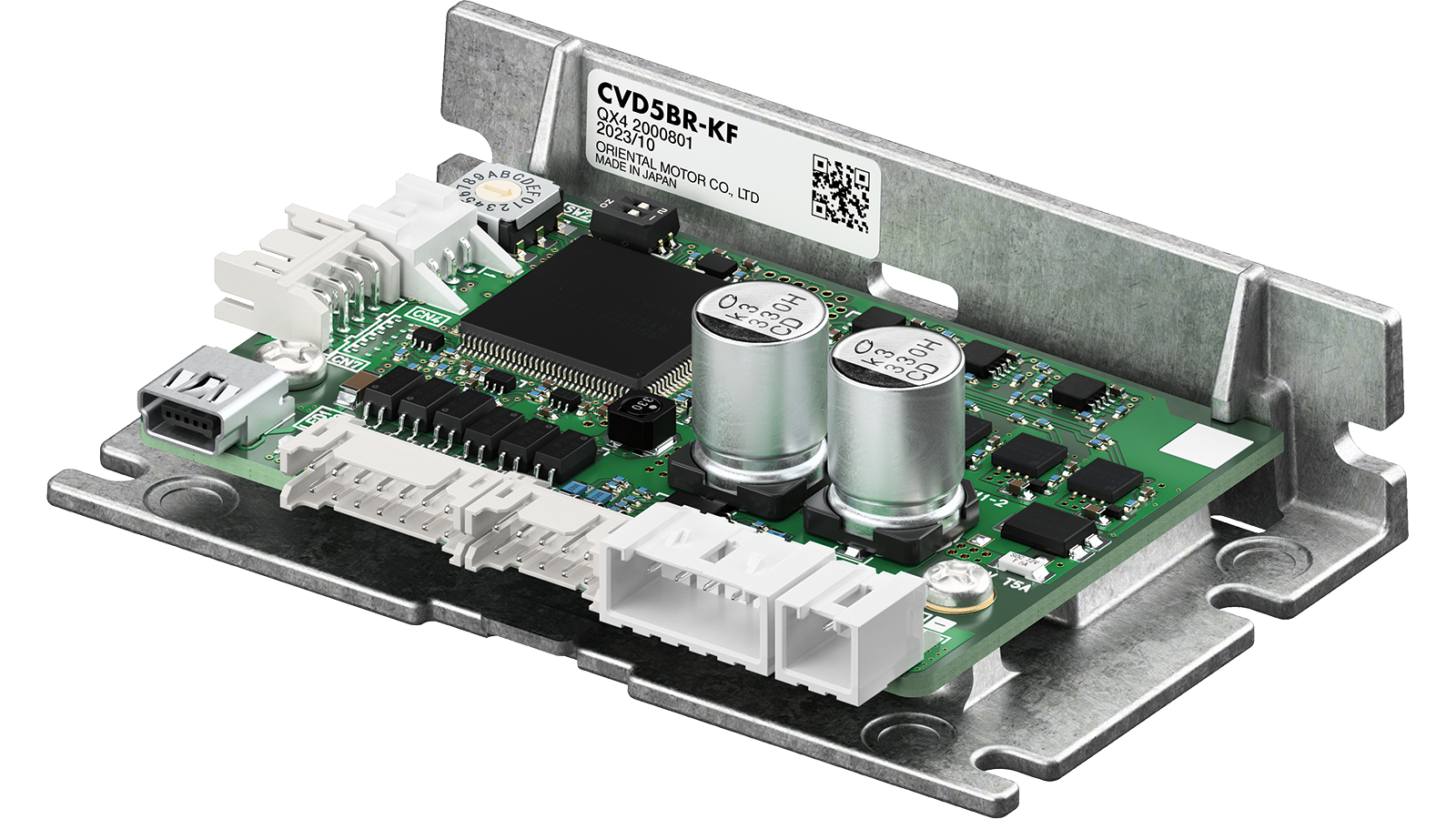
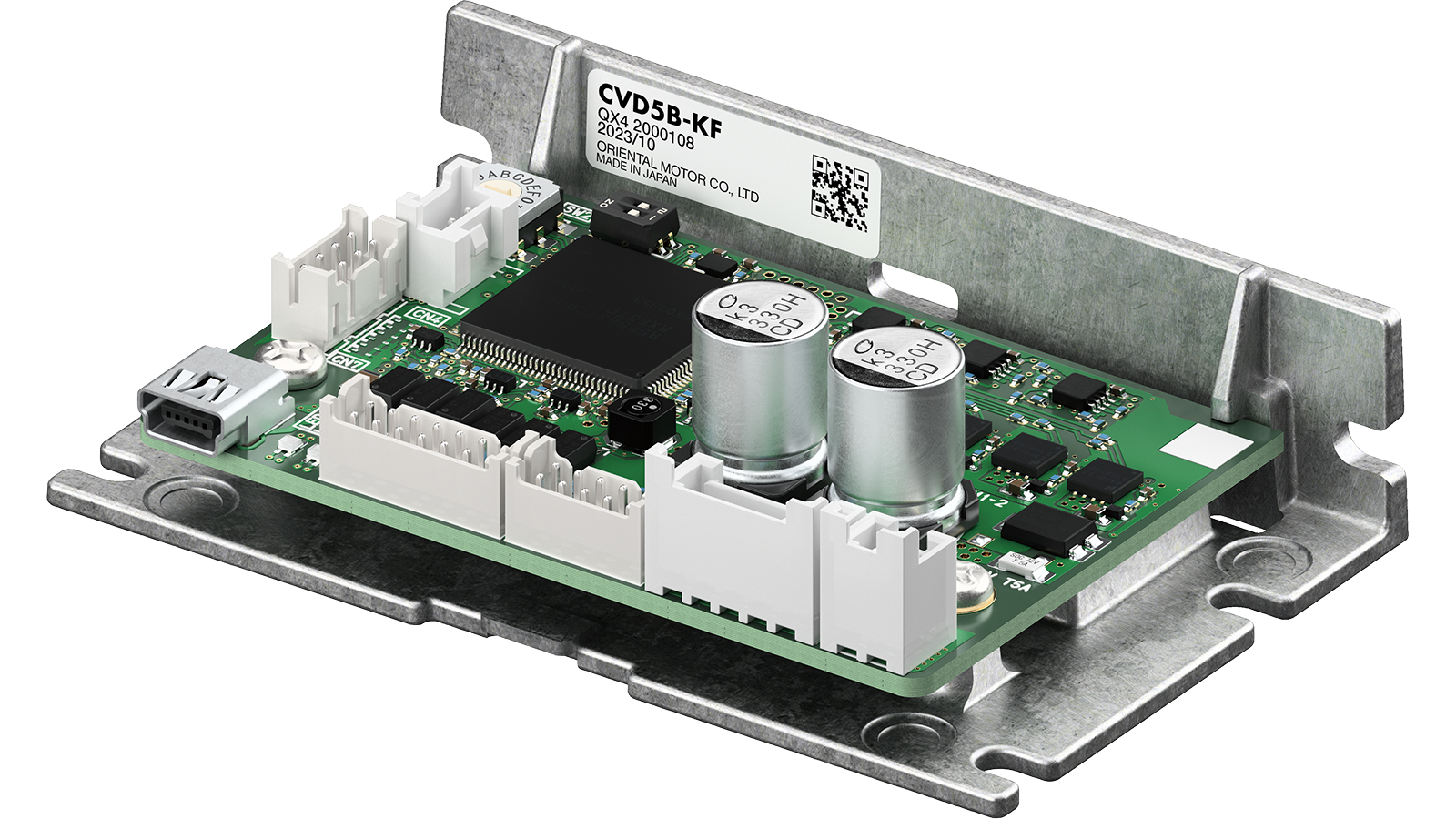
Common Driver Sizes and Installation Methods
A mounting plate common to the CVD Series is used, and the same mounting hole pitch is used. Drivers with different connector orientations are available to match the installation method of your driver.
Mass: 67 g
Driver That Can be Selected According to the Installation Method
Right-Angle Type With Mounting Plate
With Mounting Plate
The connectors are oriented horizontally to the board.
The connectors are oriented vertically to the board.
Sencillo control desde PC con el software de soporte MEXE02
Mediante el software de soporte MEXE02, se puede configurar y editar perfiles de movimiento (operation data) y diversos parámetros, además de funciones de teaching y monitorización de estados.
*The following is a partial list of product names. Can be combined with products containing the product names listed here. However, this excludes those with encoders.
*A number indicating the length of the motor case is specified where the box □ is located in the product name.
*Either A (single shaft) or B (double shaft) indicating the configuration is specified where the box ■ is located in the product name.
Bipolar Driver for 2-Phase Stepper Motor Driver for 5-Phase Stepper Motor CVD Series
These are DC input drivers for 2-phase and 5-phase stepper motors. A microstep function has been added to the driver with a low vibration design to achieve drive with even lower vibration.
Driver for 2-Phase/5-Phase Stepper Motors CVD Series Multi-Axis Type EtherCAT compatible
A multi-axis driver with DC input for driving 2-phase and 5-phase stepper motors. Four-axis control is possible, and EtherCAT is supported. Contributes to space and wiring savings in customer equipment.