Development of Robot Controller MRC01and Example for Introducing Robot to Equipment
This information is current as of August 19, 2022.
Robots are increasingly being introduced to reduce labor by automating equipment. However, because commercially available industrial robots are limited in size, and many are large, there also is a growing demand for "transitioning to in-house robot production.” Knowledge of robot control is necessary to control robots made in house, but the difficulty of robot control has been a major barrier to introducing in-house robot production.
Our newly developed robot controller MRC01 and dedicated programming software MRC Studio were developed with the aim of making robot control easy even for equipment designers who are building robots for the first time.
This section introduces the technologies and functions of MRC01 and MRC Studio, as well as examples of actual cases in which the introduction of in-house robots to in-house facilities has reduced equipment startup and programming time.
Contents
- 1. Introduction
- 2. Technology Necessary for Robot Control
- 2.1. Control of Robot
- 2.2. Forward and Inverse Kinematics
- 2.3. Singularity
- 2.4. Trajectory Control
- 3. Robot Controller MRC01
- 3.1. Structure of Controllable Robots
- 3.2. System Configuration
- 3.3. Coordinate Systems Managed by MRC01
- 3.4. Operating Functions
- 4. Protective Functions
- 4.1. Singularity Protection
- 4.2. Slip Mode
- 4.3. Stop by Error Detection in Axis During Operation
- 4.4. Position Limit and Speed Limit
- 5. Examples of MRC01 and In-house Robot Installation in a Production Facility
- 5.1. Overview of Automation Line
- 5.2. In-house Production of SCARA Robot
- 6. Effects of MRC01 Equipment Installation
- 6.1. Easy for Operation of In-House Developed Articulated Robot
- 6.2. Improvement of Working Efficiency in MRC01 and PLC Programs
- 6.3. Reduction of Time to Acquire Operating Methods of Various Robots
- 7. Summary
To read more, download and refer to the PDF file below.
1. Introduction
Global industrial robot sales have increased significantly in recent years. Especially in processes that are easy to automate, such as handling and conveyance processes, the introduction of robots is accelerating in order to reduce manpower. In many countries around the world, automation by robots will continue to advance in order to solve labor shortages caused by the decline of the working-age population.
It is common to introduce commercially available industrial robots in these situations. However, commercially available industrial robots are limited in size, and many are large, making it difficult to retrofit them into existing equipment. This has led to an increase in "transitioning to in-house robot production" and the consequent demand for robot controllers that can control in-house robots.
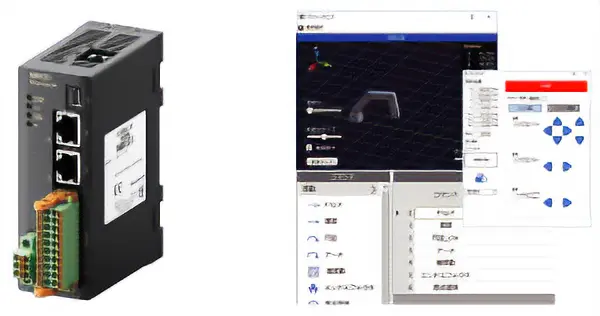
This paper describes the technology and functions of the robot controller MRC01 and dedicated programming software MRC Studio (see Figure 1), which were developed to meet this demand.
The full text on this topic can be downloaded as a PDF.
